
 科普中國(guó)公眾號(hào)
科普中國(guó)公眾號(hào)
 科普中國(guó)微博
科普中國(guó)微博

 幫助
幫助 這幾年隨著大疆創(chuàng)新(DJI)、零度智控(ZEROTECH)、億航(EHang)等公司的產(chǎn)品曝光度越來(lái)越高,無(wú)人機(jī)概念日漸火熱,其發(fā)展勢(shì)頭迅猛,就像20世紀(jì)80年代的個(gè)人電腦。在為人類服務(wù)的道路上,無(wú)人機(jī)時(shí)代正在向我們走來(lái)。
無(wú)人機(jī)到底是啥?
無(wú)人機(jī)的定義是: An aircraft without a human pilot aboard。從技術(shù)角度來(lái)劃分的話,無(wú)人機(jī)可以簡(jiǎn)單分為固定翼,直升機(jī)以及多旋翼三類。但從其定義可以看出,無(wú)人機(jī)并不局限于此,即便是無(wú)法控制,也沒(méi)有任何自駕儀的氣球炸彈也屬于無(wú)人機(jī)的范疇(在1849年,奧地利的先驅(qū)們?cè)?jīng)用裝滿炸彈的熱氣球去“轟炸”過(guò)威尼斯,這個(gè)可比日本人借助洋流將氣球炸彈送到美國(guó)東海岸的“飛象行動(dòng)”早了95年)。
通常無(wú)人機(jī)可由人員遙控操作,或是在機(jī)載計(jì)算機(jī)的控制下間歇或完全自主工作。相比于載人飛行器,最初的無(wú)人機(jī)任務(wù)定位是去處理對(duì)于人類來(lái)說(shuō)“枯燥,骯臟以及危險(xiǎn)”的工作。現(xiàn)如今,無(wú)人機(jī)的任務(wù)相比最初已經(jīng)有了極大拓展,其任務(wù)范圍從最初的軍事用途擴(kuò)展到了科學(xué)研究,農(nóng)業(yè),電力巡檢,搜救,個(gè)人娛樂(lè)等。
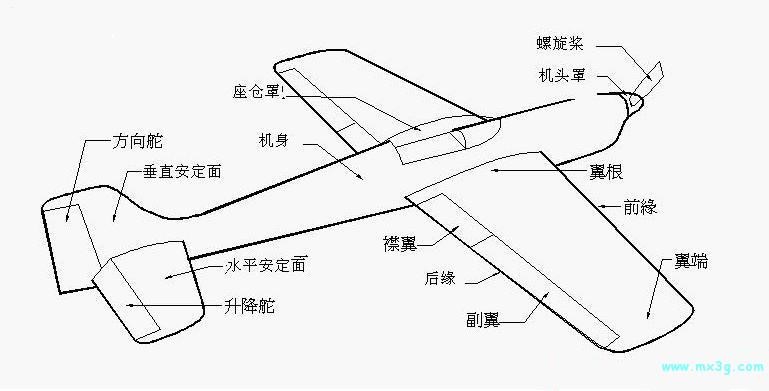
圖為常規(guī)布局固定翼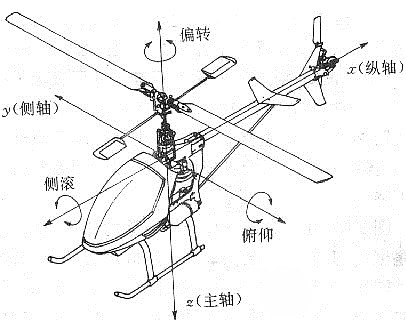
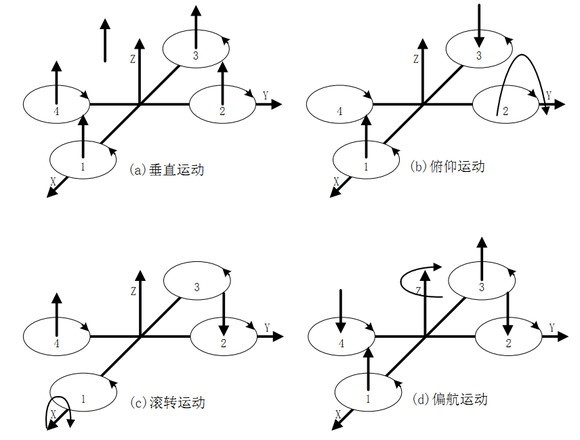
圖為直升機(jī) 圖為四旋翼控制原理
圖為美軍修復(fù)后放飛用于研究的日本氣球炸彈
無(wú)人機(jī)的系統(tǒng)特性對(duì)比
對(duì)比三種常見(jiàn)類型無(wú)人機(jī)的系統(tǒng)特性如下:
常規(guī)固定翼:系統(tǒng)為穩(wěn)定系統(tǒng),同時(shí)具有完整的驅(qū)動(dòng)系統(tǒng)。
常規(guī)直升機(jī):系統(tǒng)不穩(wěn)定,同時(shí)具有完整的驅(qū)動(dòng)系統(tǒng)。
多旋翼:系統(tǒng)既是不穩(wěn)定的,也是欠驅(qū)動(dòng)的。
雖然多旋翼控制系統(tǒng)難設(shè)計(jì),氣動(dòng)效率低,機(jī)動(dòng)性差,但其相比于其他兩類,動(dòng)力學(xué)模型和結(jié)構(gòu)相對(duì)簡(jiǎn)單,對(duì)起降場(chǎng)地以及使用者的操縱水平要求不高,再加上其酷炫的外表,引起了人們的廣泛研究與應(yīng)用,成為目前市場(chǎng)上最常見(jiàn)的無(wú)人機(jī)類型。
除了軍用與工業(yè)使用外,近年來(lái)消費(fèi)級(jí)無(wú)人機(jī)市場(chǎng)快速崛起。隨著越來(lái)越多的新晉廠商入局試水,目前市場(chǎng)上已存在各種級(jí)別的到手即飛整機(jī)供消費(fèi)者選擇,把航拍從少數(shù)專業(yè)玩家和攝像師手里解放,推向普通大眾。
無(wú)人機(jī)智能化:避障成最大需求
從這幾年發(fā)布的消費(fèi)級(jí)無(wú)人機(jī)來(lái)說(shuō),無(wú)人機(jī)愈加智能化,避障成為當(dāng)前最大的需求。現(xiàn)在市場(chǎng)上存在的避障系統(tǒng)大概可以分為三種:超聲波、TOF以及視覺(jué)系統(tǒng)。其中,基于視覺(jué)的系統(tǒng)是當(dāng)前的主流。


圖為Mavic的前向雙目立體視覺(jué) 圖為探索者2的TOF模塊
從最初的開(kāi)源PX4FLOW 光流模塊,DJI的Phantom 3系列的視覺(jué)定位,到搭載了Intel realsense的YUNEECE Typhoon H以及DJI的Phantom 4,再到DJI剛剛發(fā)布的Mavic,我們不難發(fā)現(xiàn),視覺(jué)導(dǎo)航在無(wú)人機(jī)上的應(yīng)用不再滿足于讓無(wú)人機(jī)飛得更穩(wěn),而是能夠借助該系統(tǒng)讓無(wú)人機(jī)自主完成避障的功能。
拋開(kāi)算法不說(shuō),僅從原理上來(lái)看,當(dāng)一個(gè)攝像頭內(nèi)部參數(shù)(有效焦距,光學(xué)中心,不垂直因子)已知,由圖像只可以確定出一條射線,換言之缺乏深度信息(距離信息),所以想要得到三維信息,就必須在空間中多加一個(gè)約束。
如果多加一個(gè)攝像頭,保證由兩個(gè)攝像頭通過(guò)各自對(duì)同一點(diǎn)的圖像確定的兩條射線能相交,則可以確定該點(diǎn)的空間位置,這就是雙目立體視覺(jué)。如果采用額外的光源裝置確定一個(gè)光平面,則可以得到由攝像頭及圖像上一點(diǎn)確定的射線與光平面交點(diǎn)的坐標(biāo),這就是結(jié)構(gòu)光三維視覺(jué),由此也可以看出,結(jié)構(gòu)光三維視覺(jué)只能得到光平面上的點(diǎn)位置坐標(biāo)。
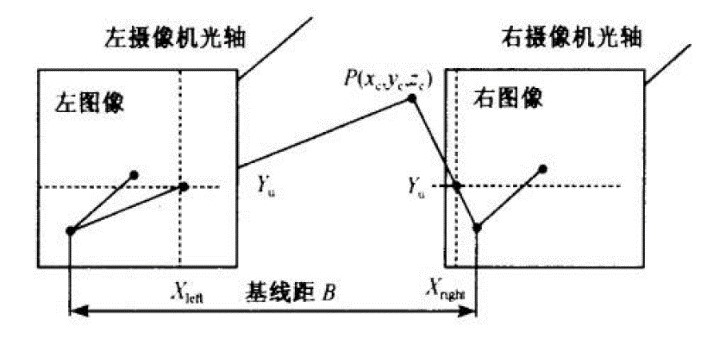
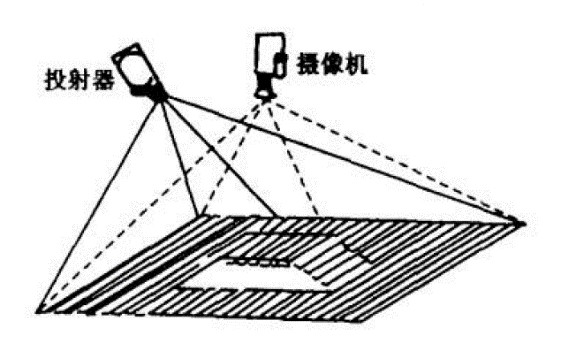
圖為雙目立體視覺(jué)原理圖 圖為結(jié)構(gòu)光三維視覺(jué)原理圖
如果按照景物的照明條件,三維視覺(jué)技術(shù)可以分為被動(dòng)和主動(dòng)兩大類。被動(dòng)式中景物的照明來(lái)自周圍物體的光照條件,主動(dòng)式中則是使用一個(gè)專門的光源裝置來(lái)提供目標(biāo)物體周圍的照明。前述的雙目立體視覺(jué)就屬于被動(dòng)方式,而結(jié)構(gòu)光三維視覺(jué)則是屬于主動(dòng)方式。被動(dòng)方式比較適合于由于環(huán)境約束或者出于保密需求而不能加裝光源的環(huán)境,而主動(dòng)方式視覺(jué)圖像信息處理簡(jiǎn)單、可靠性高,在工業(yè)生產(chǎn)中應(yīng)用廣泛。

圖為realsense
在為開(kāi)發(fā)者準(zhǔn)備的套件中,DJI的Guidance選擇了由兩個(gè)RGB攝像頭組成的雙目立體視覺(jué)加超聲波,而realsense則是由一個(gè)RGB攝像頭,加上兩個(gè)紅外攝像頭以及一個(gè)紅外發(fā)射器組成。RGB 攝像頭負(fù)責(zé)圖像信息,兩個(gè)紅外攝像頭,確定物體距離攝像頭的距離,也就是深度,從而得到三維圖像信息。就雙目立體視覺(jué)而言,對(duì)使用的環(huán)境要求較高,需要照明情況良好,觀測(cè)對(duì)象紋理明顯。至于realsense,其設(shè)計(jì)初衷是應(yīng)用在筆記本電腦以及智能設(shè)備上實(shí)現(xiàn)近距離3D建模,其紅外結(jié)構(gòu)光在室外自然光的干擾下,效果可能會(huì)受到干擾。
在已有的導(dǎo)航技術(shù)中,基于視覺(jué)的方法因其具有豐富的信息以及類似人類的感知方式,成為了極具潛力的導(dǎo)航方法之一。該技術(shù)與傳統(tǒng)的導(dǎo)航技術(shù)相結(jié)合,能夠克服慣性導(dǎo)航的積分誤差累積和衛(wèi)星導(dǎo)航信號(hào)易受干擾等缺點(diǎn),同時(shí)其豐富的信息能夠幫助飛行器“感知”周圍的情況,為實(shí)現(xiàn)飛行器實(shí)時(shí)避障提供了高效的解決方案。
無(wú)人機(jī)的“眼睛”能避障
圖文簡(jiǎn)介
這幾年隨著大疆創(chuàng)新(DJI)、零度智控(ZEROTECH)、億航(EHang)......
- 來(lái)源: 科普融合創(chuàng)作與傳播
- 上傳時(shí)間:2016-11-07
