
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 成信大機(jī)器人
成信大機(jī)器人 ABB機(jī)器人的組成和基本操作
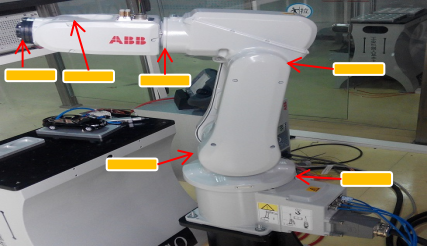
**(**一)設(shè)備組成
1.機(jī)器人 2.控制器
3.示教器 4.工作臺
5.空氣泵 6.操作臺
7.配件箱 8.工具掛板
1.機(jī)器人

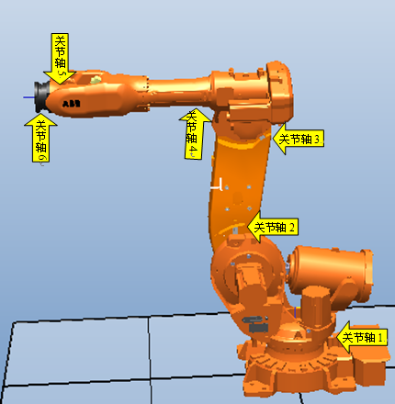
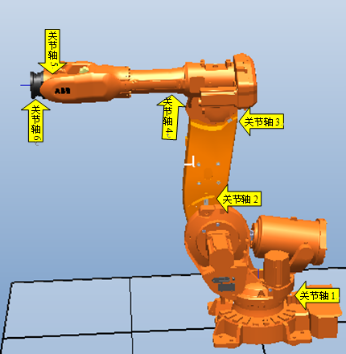
ABB-IRB120,有效負(fù)載3kg,臂展0.58米,配套工業(yè)立式IRC5控制器,示教器具有中文操作界面;底座是20mm厚鋼板地腳固定。
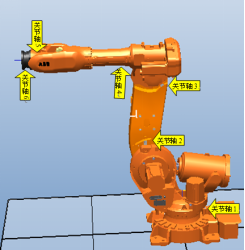
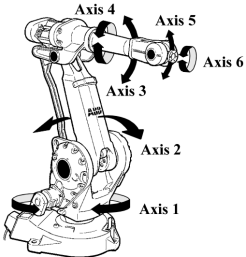
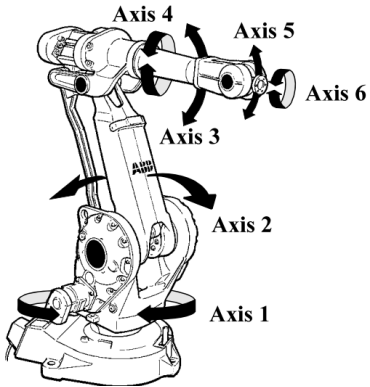
機(jī)器人本體(6軸)
l 六個關(guān)節(jié)軸
l 六臺伺服電動機(jī)
l 六個轉(zhuǎn)數(shù)計數(shù)器(編碼器)
ABB-IRB120機(jī)器人6個關(guān)節(jié)軸
六個關(guān)節(jié)軸的示意圖
2.控制器

控制器操作面板
電源開關(guān)
l 鑰匙開關(guān):
l (選擇工作模式
l 手動、手動 全速、
l 自動)
l 急停按鈕
l 復(fù)位按鈕
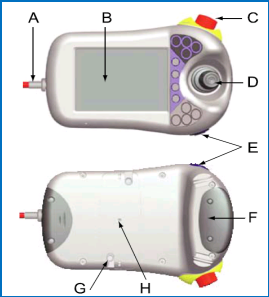
3.示教器
示教器是進(jìn)行機(jī)器人的手動操縱、程序編寫、參數(shù)配置以及監(jiān)控用的手持裝置,也是我們最常打交道的控制裝置。
A-連接電纜
B-觸摸屏
C-急停開關(guān)
D-手動操作搖桿
E-數(shù)據(jù)備份用USB接口
F-使能器按鈕
H-示教器復(fù)位按鈕
G-觸摸屏用筆
示教器操作按鍵

示教器的使能器

使能器按鈕分了兩檔,在手動狀態(tài)下第一檔按下去,機(jī)器人將處于電機(jī)開啟狀態(tài)。
第二檔按下去以后,機(jī)器人又處于防護(hù)裝置停止?fàn)顟B(tài)。
示教器搖桿的操作技巧

操縱桿的使用技巧:
我們可以將機(jī)器人的操縱桿比作汽車的油門,操縱桿的操縱幅度是與機(jī)器人的運動速度相關(guān)的。
操縱搖桿幅度較小,則機(jī)器人運動速度較慢。
操縱搖桿幅度較大,則機(jī)器人運動速度較快。所以我們在初始練習(xí)手動操縱操作時,盡量以小幅度操縱搖桿使機(jī)器人慢慢運動。
4 工作臺
空氣泵
工具掛板
安全護(hù)欄
l (二)功能任務(wù)模塊
6大任務(wù)——
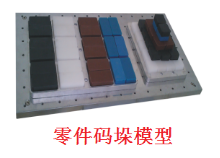
1.軌跡訓(xùn)練任務(wù) 2.零件碼垛任務(wù)
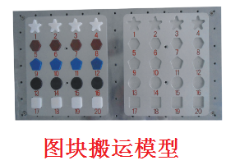
3.圖塊搬運任務(wù) 4.工件裝配任務(wù)
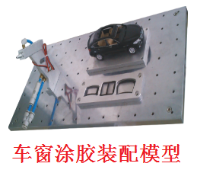
5.檢測排列任務(wù) 6.車窗涂膠裝配任務(wù)
二**、工業(yè)機(jī)器人基本操作**
(一)機(jī)器人開關(guān)機(jī)操作
(二)機(jī)器人系統(tǒng)備份
(三)機(jī)器人手動操縱
(四)機(jī)器人夾具拆裝操作
(五)機(jī)器人舞蹈程序演練
(一)開關(guān)機(jī)操作
開機(jī):在確認(rèn)輸入電壓正常后,打開控制柜操作面板的電源開關(guān)。
關(guān)機(jī):在示教器 “重新啟動”菜單中選擇“高級”;在高級子菜單選擇“關(guān)機(jī)”,等待至藍(lán)色進(jìn)度條出現(xiàn);然后關(guān)閉控制柜操作面板的電源開關(guān)。
注意:關(guān)機(jī)后再次開啟電源需要等待2分鐘。
機(jī)器人的重新啟動操作
在以下情況下需要重新啟動機(jī)器人系統(tǒng):
1)安裝了新的硬件。
2)更改了機(jī)器人系統(tǒng)配置參數(shù)。
3)出現(xiàn)系統(tǒng)故障(SYSFAIL)。
4)RAPID程序出現(xiàn)程序故障。
RAPID程序出現(xiàn)程序故障。
|| ||
機(jī)器人安全事項
|| ||
機(jī)器人安全事項
工業(yè)機(jī)器人電動機(jī)和編碼器上的安全標(biāo)志;關(guān)節(jié)軸張力控制按鈕安全標(biāo)志。
機(jī)器人安全事項



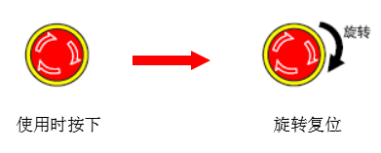
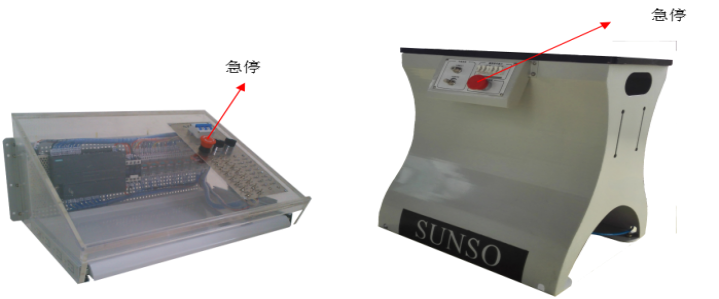
2)急停按鈕的使用
急停按鈕外觀紅色,自鎖旋放式結(jié)構(gòu)。一般安裝在設(shè)備控制柜、示教器、操作臺等顯眼位置,且在緊急或突發(fā)事故時易操作。

機(jī)器人安全事項
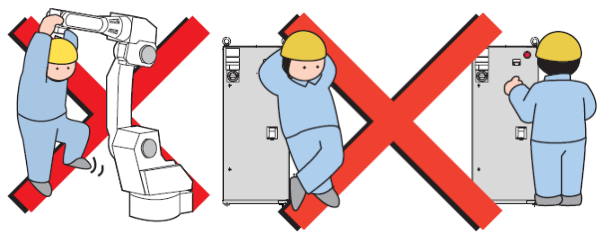
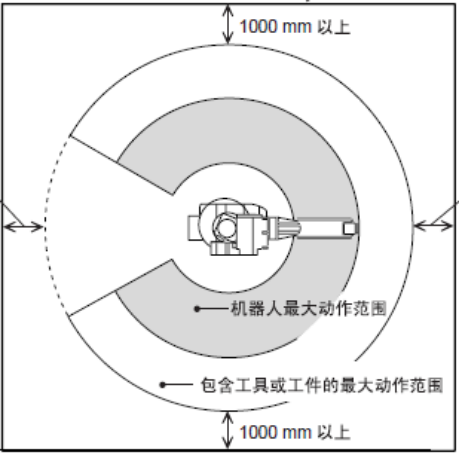
3)操作安全事項
① 嚴(yán)禁強(qiáng)制性扳動機(jī)器人運動軸; ②嚴(yán)禁依靠機(jī)器人或控制柜; ③ 禁止隨意按動操作鍵等;④機(jī)器人行程范圍內(nèi)無人員及碰撞物, 確保作業(yè)區(qū)內(nèi)安全。

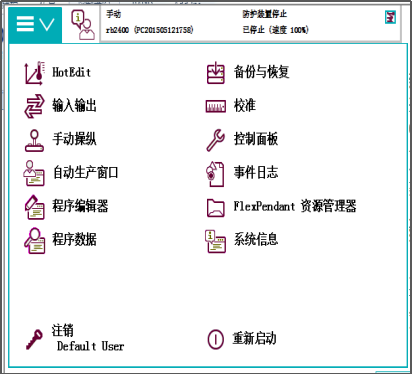
(二)備份系統(tǒng)——
下拉菜單→備份與恢復(fù)
(三)機(jī)器人手動操縱

1.關(guān)節(jié)運動
2.線性運動
3.重定位運動
4.轉(zhuǎn)數(shù)計數(shù)器更新操作
(三)機(jī)器人手動操縱
1.關(guān)節(jié)運動
【ABB→手動操縱→動作模式→軸1-3(4-6)→確定】

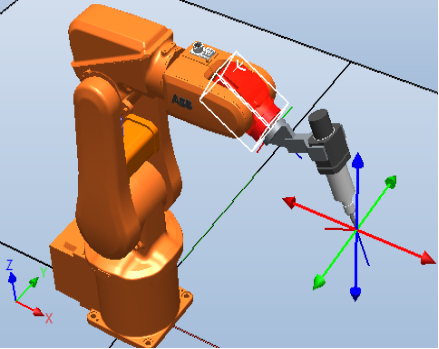
2.線性運動—是指安裝在機(jī)器人第六軸法蘭盤上的工具在空間中作線性運動。
【ABB→手動操縱→動作模式→線性→確定】
(1)使用操縱桿控制機(jī)器人運動。通過位移幅度來控制機(jī)器人運動的速度。
(2)使用“增量”模式控制機(jī)器人運動。在增量模式下,操縱桿每位移一次,機(jī)器人就移動一步。如果操縱桿持續(xù)一秒或數(shù)秒鐘,機(jī)器人就會持續(xù)移動(速率為每秒10步)。

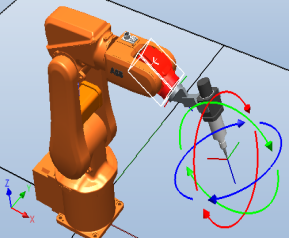
3.重定位運動
【ABB→手動操縱→動作模式→重定位→確定】
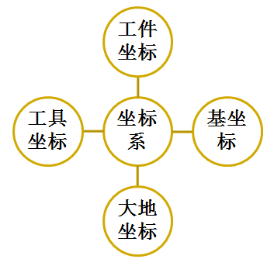
機(jī)器人的重定位運動:是指機(jī)器人第六軸法蘭盤上的工具TCP點在空間中繞著工具坐標(biāo)系旋轉(zhuǎn)的運動,也可理解為機(jī)器人繞著工具TCP點作姿態(tài)調(diào)整的運動。
重定位運動的控制模式:有操縱桿控制和增量模式控制2種,同線性運動方式。
4.轉(zhuǎn)數(shù)計數(shù)器更新操作
l 以下情況需要對機(jī)械原點的位置進(jìn)行轉(zhuǎn)數(shù)計數(shù)器更新操作:
l 更換伺服電機(jī)轉(zhuǎn)數(shù)計數(shù)器電池后。
l 當(dāng)轉(zhuǎn)數(shù)計數(shù)器發(fā)生故障,修復(fù)后。
l 轉(zhuǎn)數(shù)計數(shù)器與測量板之間斷開過以后。
l 斷電后,機(jī)器人關(guān)節(jié)軸發(fā)生了移動。
l 當(dāng)系統(tǒng)報警提示“10036 轉(zhuǎn)數(shù)計數(shù)器未更新”時。更新轉(zhuǎn)數(shù)計數(shù)器。
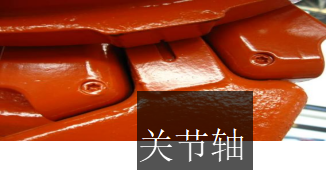
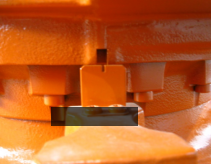
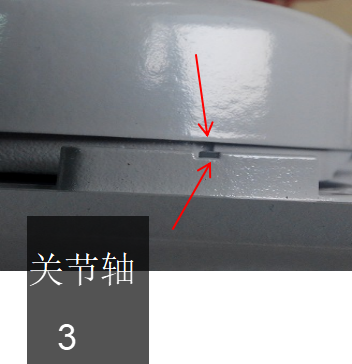
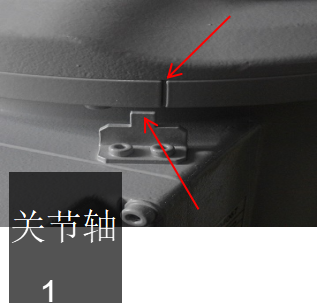
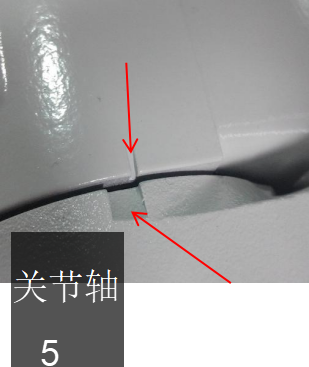
各種型號機(jī)器人機(jī)械原點刻度位置有所不同,
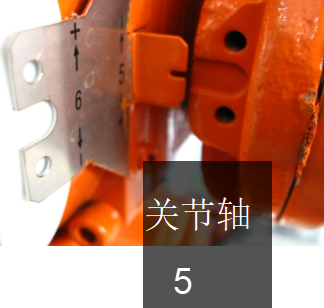



ABB—IRB6640機(jī)器人機(jī)械原點刻度位置



4.轉(zhuǎn)數(shù)計數(shù)器更新操作
電機(jī)偏移數(shù)據(jù)

操作步驟:
(1)手動操作每個關(guān)節(jié)軸到標(biāo)定的機(jī)械原點;
(2)編輯電機(jī)校準(zhǔn)偏移數(shù)據(jù);
(3)進(jìn)行校準(zhǔn)操作,更新轉(zhuǎn)數(shù)計數(shù)器。
ABB-IRB120機(jī)器人機(jī)械原點刻度位置
l
4.轉(zhuǎn)數(shù)計數(shù)器更新操作
位置偏移:如果機(jī)器人由于安裝位置的關(guān)系,六個軸無法同時到達(dá)機(jī)械原點刻度位置,則可以逐一對關(guān)節(jié)軸進(jìn)行轉(zhuǎn)數(shù)計數(shù)器更新。
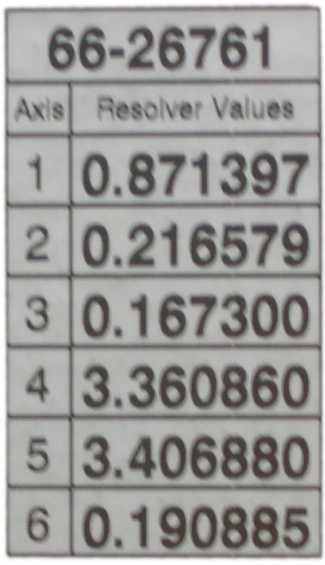
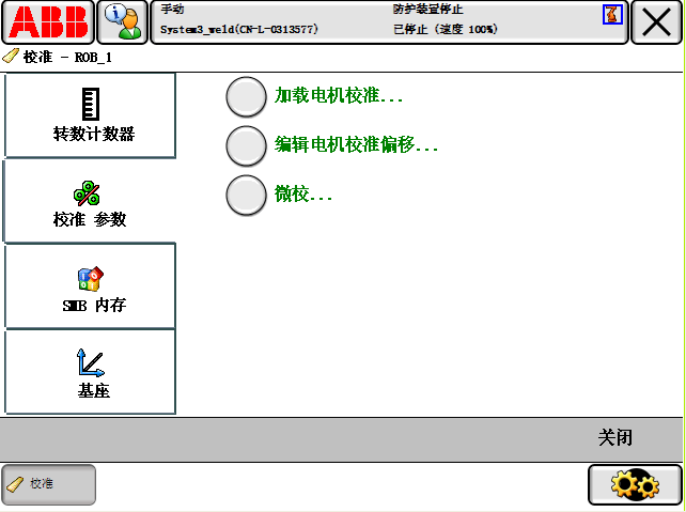
輸入校準(zhǔn)偏移數(shù)據(jù)步驟
1. 點擊”校準(zhǔn)參數(shù)”
2.點擊“編輯電機(jī)校準(zhǔn)偏移”
3.根據(jù)機(jī)器人的校準(zhǔn)參數(shù)進(jìn)行輸入
打開校準(zhǔn)畫面,進(jìn)行校準(zhǔn)操作
打開校準(zhǔn)畫面,進(jìn)行校準(zhǔn)操作
(四)夾具安裝
繪圖筆夾具的安裝:
完成軌跡訓(xùn)練任務(wù)采用繪圖
筆夾具,此夾具在與機(jī)器人
J6軸連接法蘭有四個螺絲安
裝孔,把夾具調(diào)整到合適位
置,再用螺絲將其緊固到機(jī)
器人J6軸上。
雙吸盤夾具安裝:完成圖塊搬運任務(wù)采用雙吸盤夾具,首先把雙吸盤夾具調(diào)整到合適位置(利于機(jī)器人運轉(zhuǎn)中吸取),并把夾具安裝孔與機(jī)器人J6軸安裝孔位對正;然后,用四個螺絲把夾具鎖緊
到J6軸上;再把
氣管與夾具吸盤
上真空發(fā)生器的
輸入端連接。
(五)程序演練
輸入控制程序,實現(xiàn)機(jī)器人的簡單舞蹈運動控制。
來源: 部分來自網(wǎng)絡(luò)
