
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 科普中國創(chuàng)作培育計(jì)劃
科普中國創(chuàng)作培育計(jì)劃 
HUD:擋風(fēng)玻璃上的透明儀表盤
根據(jù)世界衛(wèi)生組織的統(tǒng)計(jì),全球每年約有130萬人死于交通事故,其中94%是由人為失誤造成的。在城市道路上,以65公里的時(shí)速行駛時(shí),駕駛員低頭看儀表盤1-3秒,相當(dāng)于盲開18-54米。觸目驚心的數(shù)據(jù)背后,是傳統(tǒng)的汽車信息顯示方式與安全駕駛之間存在著天然的矛盾。
如果關(guān)鍵的駕駛信息能夠"懸浮"在前方道路上,讓駕駛員不必移開視線就能看到車速、導(dǎo)航指示,甚至是前方障礙物警告,會怎樣?這就是抬頭顯示器(Head-Up Display,簡稱HUD)。

這項(xiàng)技術(shù)的故事要從1960年的軍用航空說起。當(dāng)時(shí)的戰(zhàn)斗機(jī)飛行員面臨著一個生死攸關(guān)的問題:在高速飛行和激烈戰(zhàn)斗中,哪怕低頭看儀表一秒鐘,都可能錯失戰(zhàn)機(jī)或陷入危險(xiǎn)。于是,工程師們將關(guān)鍵信息投射到飛行員正前方的透明屏幕上,這就是HUD的前身。1988年,通用汽車收購休斯航天公司后,首次將這項(xiàng)軍用技術(shù)引入民用汽車,推出了第一款配備HUD的量產(chǎn)車型--Oldsmobile Cutlass Supreme Indy 500 Pace Car,一款專為紀(jì)念印第安納波利斯500英里大賽而打造的特別版轎車。但它的HUD系統(tǒng)還相當(dāng)原始,只能在擋風(fēng)玻璃上顯示簡單的數(shù)字車速,顯示區(qū)域也僅有巴掌大小。
然而,早期的汽車HUD遠(yuǎn)沒有今天這般先進(jìn)。它們面臨著諸多技術(shù)挑戰(zhàn),例如顯示亮度不足、在強(qiáng)光下幾乎看不清;顯示內(nèi)容單一,通常只有車速,且由于成本過于高昂,使其長期局限于豪華車型,這種局面一直持續(xù)到21世紀(jì)初。幾項(xiàng)關(guān)鍵技術(shù)的突破徹底改變了HUD的命運(yùn):
首先是顯示技術(shù)的革命。隨著手機(jī)和平板電腦的普及,LCD和LED技術(shù)實(shí)現(xiàn)了質(zhì)的飛躍,不僅亮度大幅提升,成本也急劇下降。一塊車規(guī)級LCD顯示屏的價(jià)格從上千美元降到了幾百美元。

而更關(guān)鍵的是汽車電子架構(gòu)的進(jìn)化。在1990年代,汽車內(nèi)部的電子系統(tǒng)就像是各自為政的信息孤島。速度傳感器歸儀表盤管,發(fā)動機(jī)數(shù)據(jù)歸發(fā)動機(jī)控制單元管。如果HUD想要顯示車速,就需要從速度傳感器單獨(dú)拉一根線;想顯示轉(zhuǎn)速,又得接入轉(zhuǎn)速表信號;想顯示導(dǎo)航信息,還得想辦法和導(dǎo)航系統(tǒng)對話。而21世紀(jì)初,一項(xiàng)技術(shù)改變了這一切——CAN總線(Controller Area Network,控制器局域網(wǎng)絡(luò))。這項(xiàng)技術(shù)最初是為了解決汽車線束過于復(fù)雜的問題,卻意外地為HUD的普及鋪平了道路。CAN總線就像是給整棟樓裝了一套內(nèi)部網(wǎng)絡(luò)。所有設(shè)備都連接到這個網(wǎng)絡(luò)上,任何信息都可以通過統(tǒng)一的語言在網(wǎng)絡(luò)中傳輸。這意味著HUD系統(tǒng)只需要接入CAN總線這一根網(wǎng)線,就能獲取整車的幾乎所有信息。而且這些數(shù)據(jù)都是標(biāo)準(zhǔn)化的,CAN總線上的數(shù)據(jù)有統(tǒng)一的格式,一家HUD供應(yīng)商開發(fā)的產(chǎn)品,可以相對容易地適配不同品牌、不同型號的汽車。
隨著技術(shù)的進(jìn)一步發(fā)展,汽車的電子架構(gòu)也在不斷進(jìn)化。從最初的CAN總線,到后來的FlexRay(更高速)、MOST(多媒體專用)、以太網(wǎng)(超高速),汽車內(nèi)部的信息高速公路越修越寬。到了2010年代,一輛普通家用車內(nèi)部的數(shù)據(jù)傳輸速度已經(jīng)可以達(dá)到100Mbps以上,足以支持高清視頻的實(shí)時(shí)傳輸。
正是在這樣的背景下,HUD技術(shù)迎來了快速發(fā)展期,并逐漸形成了三個清晰的發(fā)展階段:
第一代:C-HUD(組合式HUD)
這代HUD的核心是一塊傾斜安裝在儀表臺上的半透明樹脂板,本質(zhì)上就是一面半反半透的鏡子。其工作原理相當(dāng)簡單:儀表臺內(nèi)的小型投影儀向上投射圖像,經(jīng)過這塊傾斜的透明板反射后進(jìn)入駕駛員的眼睛。就像在玻璃窗上既能看到自己的倒影,又能看到窗外的風(fēng)景一樣。
但這種設(shè)計(jì)無法實(shí)現(xiàn)遠(yuǎn)距離成像,又由于缺少復(fù)雜的透鏡組來調(diào)節(jié)光路,虛擬圖像只能形成在玻璃板后方約2米的位置。駕駛員的眼睛仍然需要在遠(yuǎn)處的道路和近處的顯示信息之間不斷調(diào)節(jié)焦距,而且這塊突出在儀表臺上的玻璃板,一旦發(fā)生碰撞,它很可能會脫落并造成二次傷害。
汽車工程師們開始思考:既然汽車本身就有一塊巨大的擋風(fēng)玻璃,為什么不直接利用它呢?
第二代:W-HUD(風(fēng)擋式HUD)
這個看似簡單的想法,實(shí)施起來卻充滿挑戰(zhàn)。擋風(fēng)玻璃雖然是現(xiàn)成的,但它可不是為顯示圖像而設(shè)計(jì)的,它是弧形的、傾斜的,而且每款車的曲率都不相同。如何在這樣一個不規(guī)則屏幕上投射出清晰、不變形的圖像?
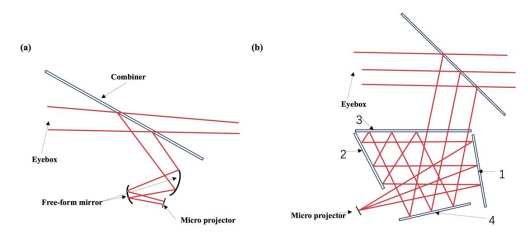
答案是自由曲面反射鏡技術(shù)。通過一種特殊形狀的鏡子,能夠預(yù)先矯正圖像的變形。眼鏡能矯正視力,而這面特殊的鏡子能夠補(bǔ)償擋風(fēng)玻璃造成的光學(xué)畸變。
位于儀表臺深處的投影單元(PGU)發(fā)出圖像,經(jīng)過第一面平面鏡改變光路方向,再通過自由曲面鏡放大并矯正圖像,最后投射到擋風(fēng)玻璃上。擋風(fēng)玻璃的內(nèi)表面就像一面微弱的反射鏡,將部分光線反射進(jìn)駕駛員的眼睛,而大部分光線則透過玻璃,不影響對外界的觀察。
這種設(shè)計(jì)使得虛擬圖像的距離延伸到了4-5米,雖然還不能完全與路面融合,但已經(jīng)大大減少了眼睛的調(diào)焦負(fù)擔(dān)。其次,顯示區(qū)域擴(kuò)大了3-4倍,不再局限于顯示簡單的數(shù)字,而是能夠呈現(xiàn)圖形化的導(dǎo)航箭頭、來電顯示。
第三代:AR-HUD(增強(qiáng)現(xiàn)實(shí)HUD)
在介紹AR-HUD之前,你或許已經(jīng)看到了一個熟悉的概念:增強(qiáng)現(xiàn)實(shí)AR。不同于VR(虛擬現(xiàn)實(shí))創(chuàng)造一個完全虛擬的世界,AR是在真實(shí)世界的基礎(chǔ)上疊加一層數(shù)字信息。例如一些手機(jī)上的各種AR應(yīng)用,用手機(jī)拍照時(shí)可以添加的虛擬貼紙、能看到家具擺放效果的裝修軟件。虛擬的元素看起來就像真的存在于現(xiàn)實(shí)世界中。
AR技術(shù)的核心在于兩個字:融合。它需要精確地識別現(xiàn)實(shí)環(huán)境,計(jì)算出虛擬物體應(yīng)該出現(xiàn)的位置、大小和角度,然后將其無縫地嵌入到真實(shí)場景中。如果能把這種技術(shù)應(yīng)用在駕駛上,讓導(dǎo)航信息不再是抽象的箭頭和數(shù)字,而是直接畫在真實(shí)的道路上呢?
但從想法到現(xiàn)實(shí),挑戰(zhàn)重重。手機(jī)AR只需要處理一塊幾英寸的屏幕,而汽車AR-HUD要在整個駕駛視野中實(shí)現(xiàn)虛實(shí)融合。手機(jī)可以隨時(shí)調(diào)整角度和距離,而駕駛員的視角是相對固定的。如何讓虛擬信息在高速行駛、顛簸路況下依然穩(wěn)定地貼在道路上?如何確保在強(qiáng)烈陽光下圖像依然清晰可見?這些都是AR-HUD必須解決的難題。
工程師們讓光線在系統(tǒng)內(nèi)部多次反射,像折紙一樣把長長的光路折疊起來。一個典型的AR-HUD,其內(nèi)部光路總長度可能超過1.5米,但通過多次反射,整個系統(tǒng)可以裝進(jìn)一個鞋盒大小的空間。
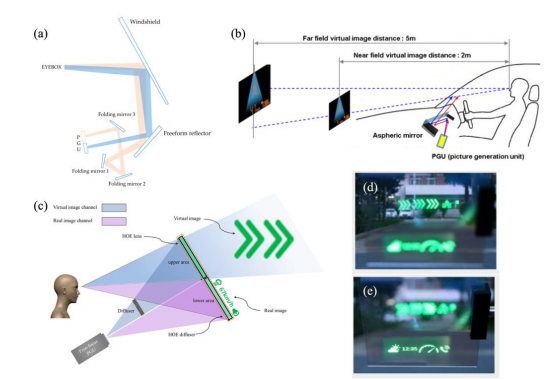
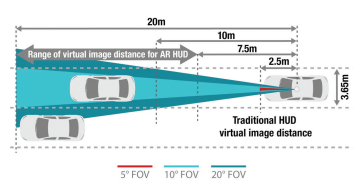
但光路折疊只解決了體積問題,更大的挑戰(zhàn)是成像距離。傳統(tǒng)HUD的虛像只能投射到5米左右,而AR-HUD需要達(dá)到20米甚至更遠(yuǎn),不僅要照得更遠(yuǎn),光斑還不能散開,圖像必須保持清晰。
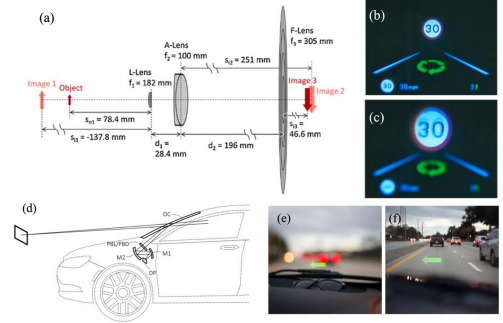
為了實(shí)現(xiàn)這個目標(biāo),AR-HUD采用了自由曲面反射鏡。每一個點(diǎn)的曲率都不相同,能夠同時(shí)完成三項(xiàng)任務(wù):放大圖像、矯正畸變、調(diào)整焦距。AR-HUD的放大倍數(shù)高達(dá)30倍,這也意味著進(jìn)入系統(tǒng)的陽光也會被放大30倍,工程師們在光學(xué)表面鍍上特殊的薄膜,它只反射顯示所需的特定波長,而讓大部分陽光直接透過。同時(shí),系統(tǒng)會根據(jù)環(huán)境光強(qiáng)度智能調(diào)節(jié)顯示亮度,確保無論是正午的烈日還是夜晚的暗光,圖像都清晰可見。
光學(xué)系統(tǒng)只是硬件基礎(chǔ),讓AR-HUD活起來的是背后的智能算法。系統(tǒng)需要實(shí)時(shí)獲取車輛位置、識別道路環(huán)境、計(jì)算虛擬圖像的準(zhǔn)確位置。前視攝像頭、毫米波雷達(dá)、GPS定位、高精地圖……所有傳感器的數(shù)據(jù)在此匯聚,經(jīng)過每秒上億次的運(yùn)算,才能讓虛擬的導(dǎo)航線穩(wěn)穩(wěn)地貼在真實(shí)道路上。
站在技術(shù)發(fā)展的十字路口,HUD的未來充滿無限可能。光波導(dǎo)技術(shù)有望將整個系統(tǒng)壓縮到一本書的厚度,讓每一輛車都能輕松配備;全息投影可能實(shí)現(xiàn)真正的3D立體顯示,虛擬信息將不再局限于一個平面;而隨著自動駕駛技術(shù)的成熟,HUD或許會成為人與智能汽車溝通的主要界面,在擋風(fēng)玻璃上展現(xiàn)一個全新的信息世界。
參考文獻(xiàn)
[1] Mike Firth. Introduction to automotive augmented reality head-up displays using TI DLP? technology[R]. Texas Instruments, 2019.
[2] Chen Zhou, Wen Qiao, Jianyu Hua, Linsen Chen. Automotive Augmented Reality Head-Up Displays[J]. Micromachines, 2024, 15(4): 442.
本文為科普中國·創(chuàng)作培育計(jì)劃扶持作品
出品丨中國科協(xié)科普部
監(jiān)制丨中國科學(xué)技術(shù)出版社有限公司、北京中科星河文化傳媒有限公司
作者丨蔡文垂 中國科學(xué)院大學(xué)博士研究生
審核丨孫明軒 上海工程技術(shù)大學(xué) 教授
來源: 科普中國創(chuàng)作培育計(jì)劃
內(nèi)容資源由項(xiàng)目單位提供
