
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 科普中國創作培育計劃
科普中國創作培育計劃 
首先問一個問題:下圖中,手里把玩的是什么?
相信很多年齡30+的人都知道,這是“電子寵物”。
“電子寵物”是20世紀90年代興起的一種便攜式電子設備,用戶可以在其中飼養、照顧虛擬寵物,并與它們互動。這些設備通常以小型液晶屏幕顯示寵物的狀態,用戶通過按鍵進行操作。用戶需要定期喂食、清潔、娛樂和照顧電子寵物,否則寵物可能會生病甚至死亡。
那“電子寵物”是不是一種人工生命?
再來問一個問題:下圖中,這籃子里的又是什么?

這是一款由Vanguard公司研發的AI寵物機器人Moflin。
在AI的驅動下,Moflin就像一個有情感的“生物”,可以在與人互動的過程中不斷學習和進化,表達和回應情感,就像在與一只活生生的寵物互動。
那這類萌萌的AI寵物是不是一種人工生命?
以上兩個答案稍后揭曉。
人工生命-ALife的定義
人工生命(Artificial Life,簡稱ALife)是一個跨學科的研究領域,旨在通過模擬和創造生命系統的行為、特征和過程來理解生命的本質。人工生命不僅僅關注生物學上已知的生命形式,而是嘗試創建能夠模仿或實現生命過程的人工系統。最早先由計算機科學家克里斯托弗?蘭頓于1987年在洛斯阿拉莫斯國家實驗室召開的“生成以及模擬生命系統的國際會議”上提出[1]。
注:人工生命(Artificial life)中的“Artificial”一詞在中文語境里有“人工”之意,但筆者認為不能準確地表達出Artificial中的“Art”,所以后文統一簡稱為ALife。
ALife的形式
所以在ALife.org等科研領域的語境下,“電子寵物”和裝載AI的毛絨玩具的都不能算是ALife。
那科研領域的ALife有哪些形式呢?
筆者梳理了一下核心的幾種ALife形式,在某些文章中也把這種形式稱之為基質(Substrates)。由于每種形式/基質背后都有很復雜的衍生和體系,文章篇幅有限這里只做簡介。
1.鳥群模擬(Boids)
Boids 是一種模擬鳥群、魚群等群體行為的計算機模型,由 Craig Reynolds 在1986年提出。Boids 模型通過簡單的規則模擬個體之間的相互作用,從而展現出復雜的群體行為。Boids 不僅用于計算機圖形學和游戲開發,還在生物學、機器人學和復雜系統研究中得到廣泛應用。
多主體模擬軟件Netlogo內置模型就可以進行鳥群模擬。值得注意的是Netlogo的logo就是Boids的圖標。
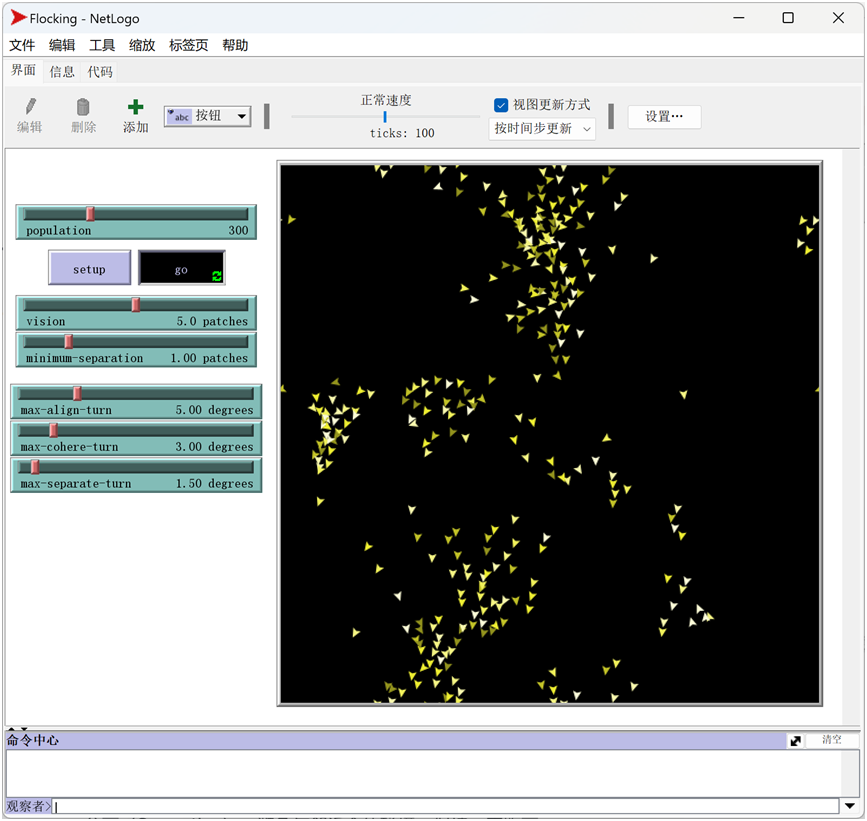
通過Netlogo進行多主體模擬Boids
Boids 模型基于三個基本規則,每個個體(稱為 Boid)根據這些規則調整其運動方向和速度:
聚集(Cohesion):向鄰近個體的平均位置移動,保持群體緊密。
分離(Separation):避免與鄰近個體碰撞,保持一定距離。
對齊(Alignment):調整運動方向,使其與鄰近個體的平均方向一致。
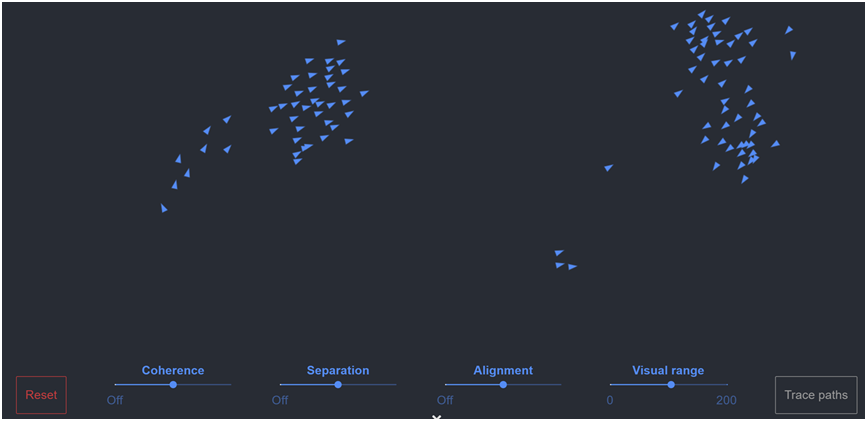
在線模擬網站:[eater.net/boids],可以修改下方的聚集、分離、對齊等參數,觀察鳥群不同行為的模擬。
2.粒子生命(Particle Life,簡稱:Plife)
Particle Life 是一種基于粒子相互作用的模擬系統,用于研究復雜行為和自組織現象。與傳統的元胞自動機(如生命游戲)不同,Particle Life 通過模擬粒子之間的吸引和排斥力,展示出類似生命的行為,如集群、運動和結構形成。
像生命一樣的粒子運動
Particle Life 的核心是設定粒子之間的相互作用規則。每個粒子根據其與其他粒子的距離和周圍粒子類型,受到不同大小的吸引或排斥力。這些力的組合決定了粒子的運動軌跡和系統的整體行為。
如下圖所示,左側的顏色矩陣代表粒子運動規則,可以看到一共有6種顏色的粒子。矩陣表示的是這些粒子之間的引力與排斥力關系,其中,綠色深淺代表吸引力大小,紅色深淺代表排斥力大小。粒子下一時刻的位置就是由周邊粒子所決定的。
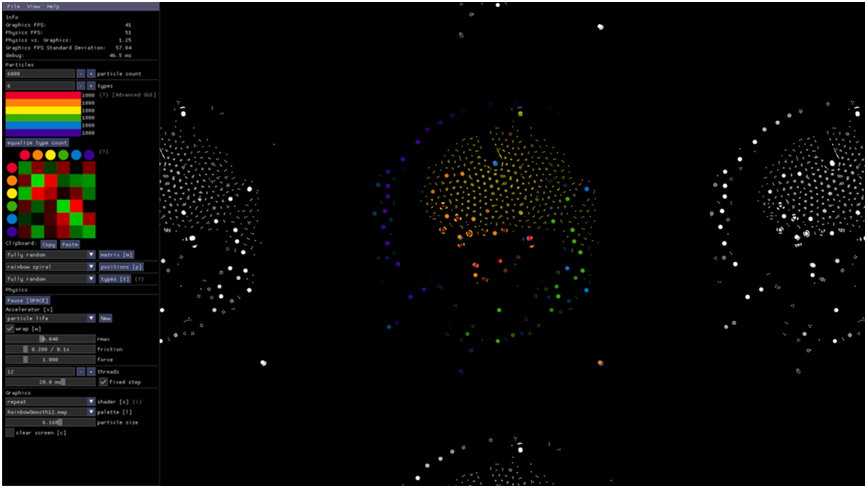
粒子生命模擬程序,來源:網頁[particle-life.com/]
3.生命游戲(Game of Life,簡稱:GOL)
生命游戲是由英國數學家約翰?康威(John Conway)在1970年提出的一種元胞自動機(Cellular Automaton)。生命游戲通過簡單的規則模擬了生命的誕生、生存和死亡,展示了復雜系統如何從簡單規則中涌現出復雜行為。其規則非常簡單:
細胞只有兩種狀態,“生”(顯示具有顏色),“死”(顯示為白色);而細胞下一刻的“生”與“死”是由細胞周圍細胞的狀態來決定的,如下圖:
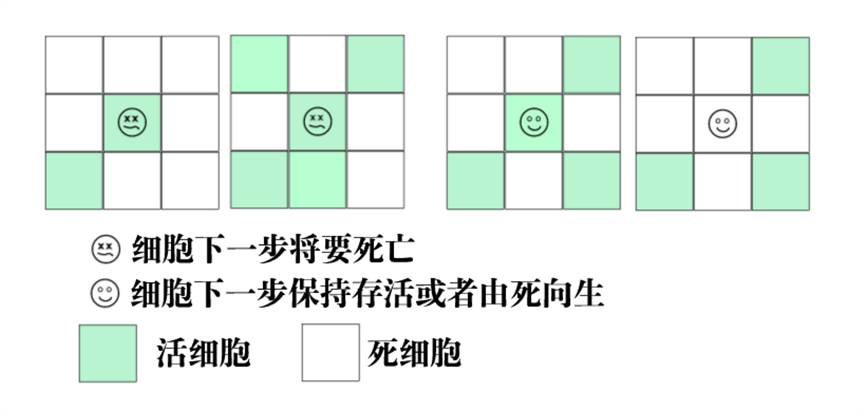
生命游戲的生死規則,圖片來源:網頁[zhuanlan.zhihu.com/p/413827037]
基于該簡單規則,通過初始值的設定就能展現非常復雜的圖案。
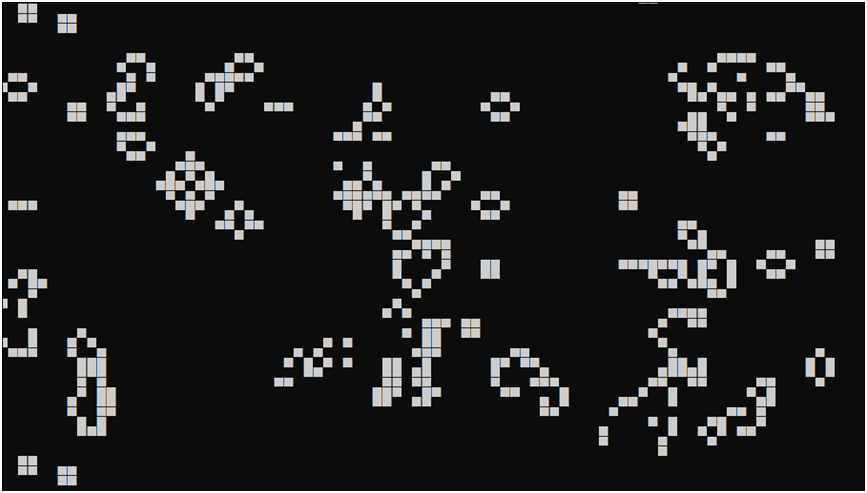
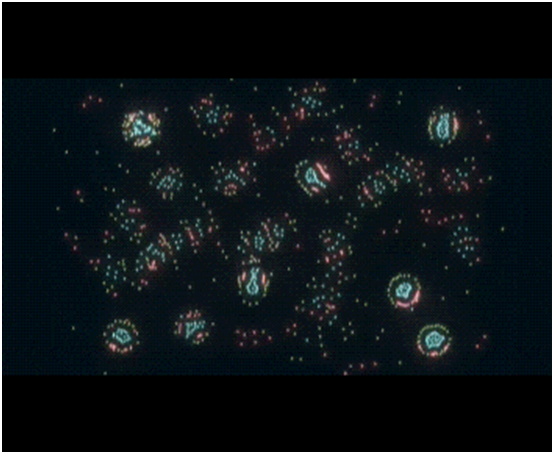
最經典的生命游戲

規則擴展后的生命游戲 像綻放的玫瑰
4.Lenia
Lenia 是一種基于連續空間和時間的元胞自動機,由 Bert Wang-Chak Chan 在2018年提出。Lenia 通過擴展傳統的元胞自動機(如康威的生命游戲),引入了連續的狀態和空間,從而能夠模擬出更加復雜和逼真的生命形態。
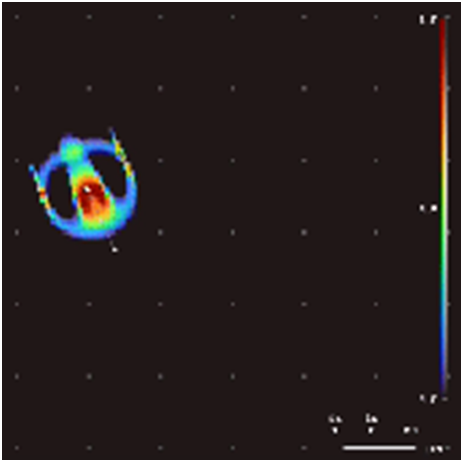
像水母一樣運動的Lenia模擬生命
Lenia 的核心思想是將傳統的離散元胞自動機擴展到連續空間和時間。每個細胞的狀態不再局限于離散的“存活”或“死亡”,而是可以在一個連續的范圍內變化。Lenia 的演化規則基于局部相互作用和全局更新,通過卷積核(Kernel)和生長函數(Growth Function)來描述細胞之間的相互作用。
Lenia模擬界面,來源:網頁[chakazul.github.io/Lenia/JavaScript/Lenia.html]
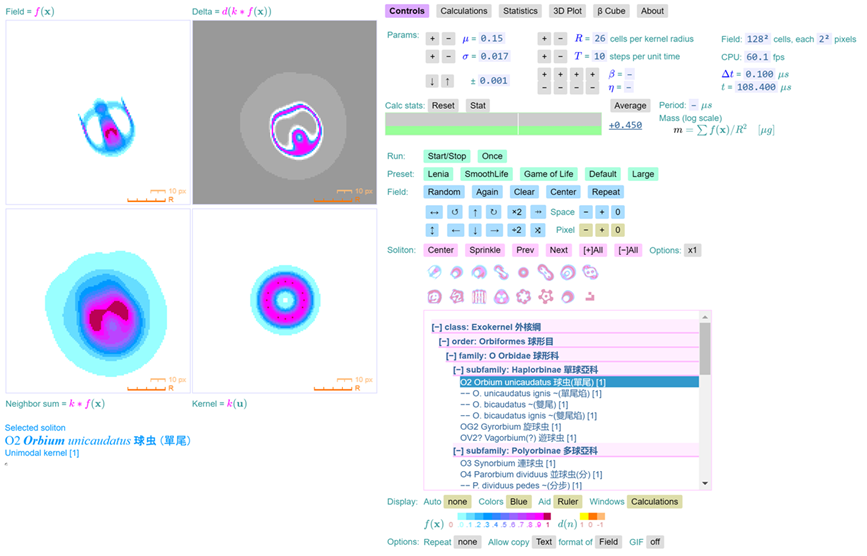
5.粒子Lenia(Particle Lenia,簡稱:Plenia)
Particle Lenia 是 Lenia 的一種變體,將 Lenia 的連續元胞自動機模型擴展到粒子系統。與傳統的 Lenia 不同,Particle Lenia 使用粒子來表示狀態,并通過粒子之間的相互作用來模擬復雜的行為和自組織現象。Particle Lenia 結合了粒子系統和 Lenia 的優點,能夠生成更加動態和多樣化的模式。
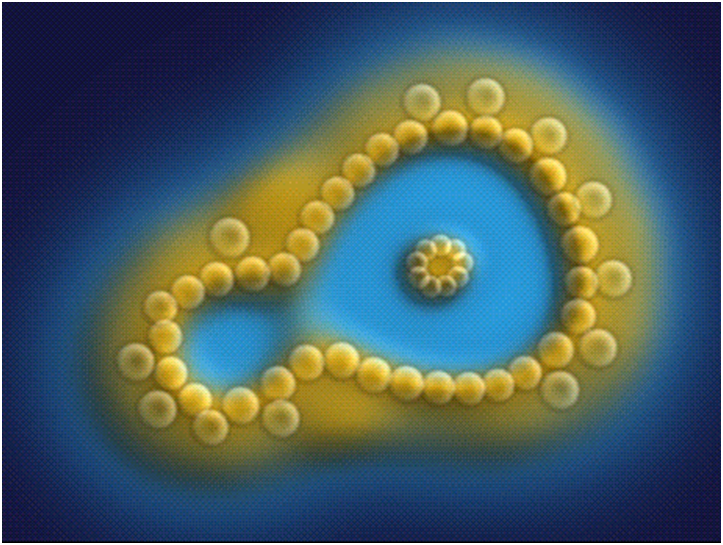
具有心跳的“細胞”
Particle Lenia 的核心思想是將 Lenia 的連續狀態和空間擴展到粒子系統。每個粒子具有連續的狀態值,并通過局部相互作用規則進行更新。粒子之間的相互作用通過卷積核和生長函數來描述,規則類似于 Lenia 。
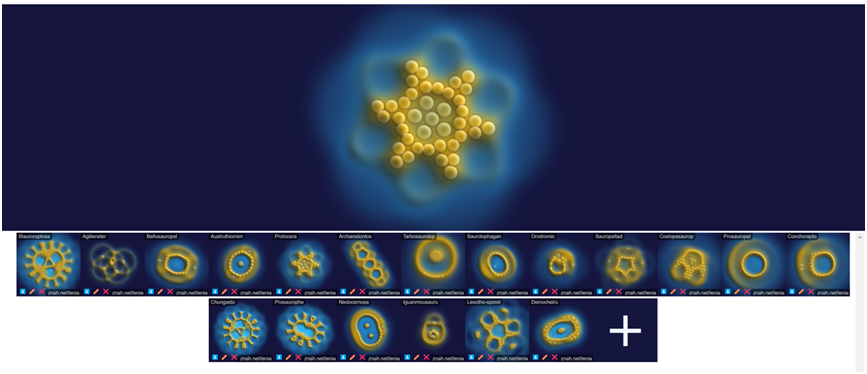
粒子Lenia的不同形式,可參考:網頁[znah.net/lenia/]
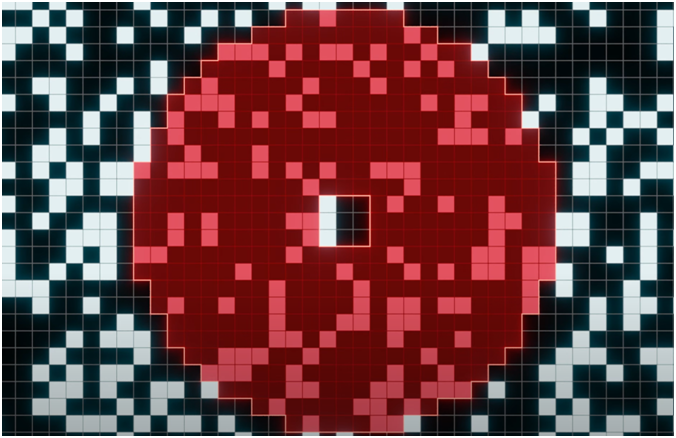
6.神經元胞自動機(Neural Cellular Automata, 簡稱:NCA)
神經元胞自動機是一種結合了元胞自動機和神經網絡(Neural Networks)的模型。它通過將神經網絡的表達能力引入元胞自動機的局部更新規則,能夠生成復雜的、自適應的模式和行為。NCA在計算機圖形學、人工生命、生物學模擬和機器學習等領域具有廣泛的應用潛力。
通過NCA構建的一只“形態發生”中的蜥蜴
NCA 的核心思想是使用神經網絡來定義元胞自動機中每個細胞的更新規則。與傳統元胞自動機不同,NCA 的規則不是固定的,而是通過神經網絡動態學習得到的。這使得 NCA 能夠生成更加復雜和多樣化的模式,并且具有更強的適應性和泛化能力。
值得一提的是,NCA的延伸版GNCA(Growing Neural Cellular Automata)可以通過局部規則實現全局模式的生成和修復,目前廣泛用于生物再生能力,癌細胞擴散預測等領域。
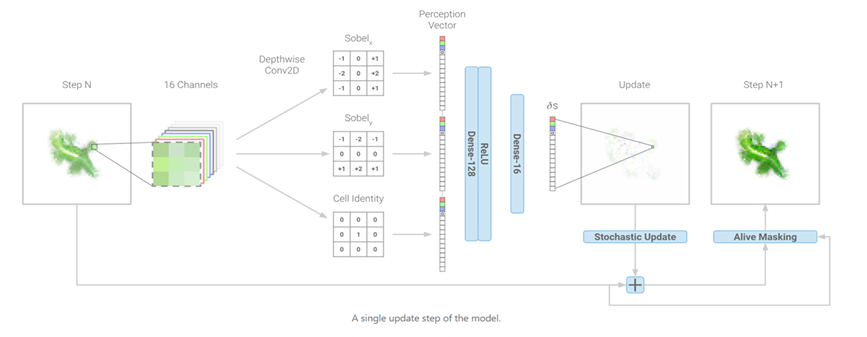
GNCA 架構,可參考:網頁[distill.pub/2020/growing-ca/]
7.其他ALife形式
其他形式可以參考網站:
網頁[google-research.github.io/self-organising-systems/]
該網站的截圖
ALife的共性
通過ALife的形式可以看到,ALife存在一個核心概念,就是自組織(Self Organising)。自組織指系統內部通過局部的交互作用和簡單的規則,自動生成復雜、結構化的整體行為,而無需外部的中央控制。也就是說,ALife這些類生命現象,都由更小的“主體”自組織組成。
就像很多粒子組成了“細胞”,很多蜜蜂組成了蜂群一樣,多個主體(Agent)組成更高形態的“類生命”。這些主體并不聽命于某個中央控制的主體,而是基于一定的規則(如核函數)來決定自己的狀態。
比如,在生命游戲中,某個點的下一時刻狀態就是由“鄰居”狀態組成,如圖:
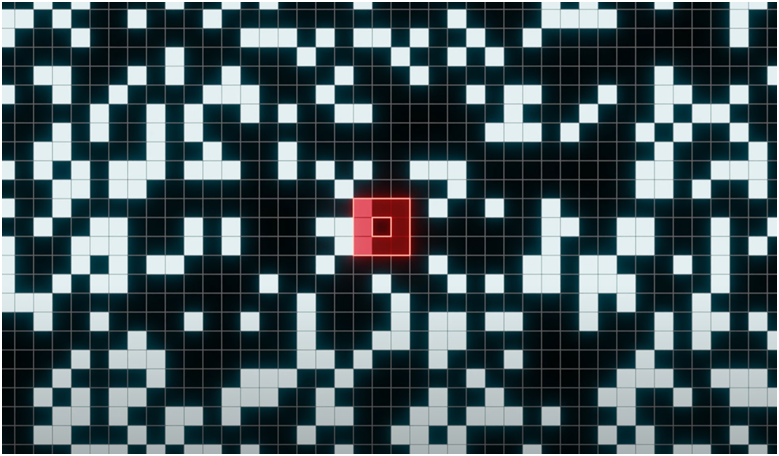
生命游戲的核函數作用范圍:大小為3x3(紅色部分),來源:網頁[www.youtube.com/watch?v=6kiBYjvyojQ]
使用A來表示當前狀態,使用K來表示核函數,那么生命游戲中,世界的變化就可以用以下的公式來表達:
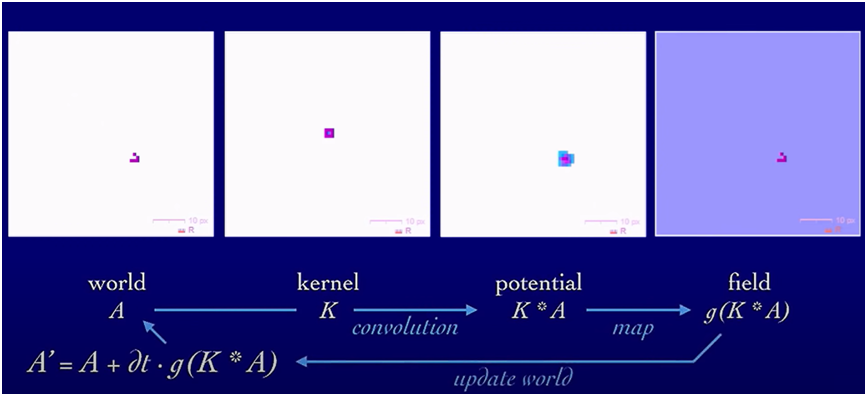
生命游戲的范式,來源:網頁[www.youtube.com/watch?v=7-97RhAZhXI&t]
對于Lenia,世界變化的范式與生命游戲相同,也由當前狀態A和核函數K決定,區別就在于使用的具體函數不同。例如,Lenia的核函數范圍就不只是3*3范圍,而是更大的范圍,如圖:
Lenia的核函數作用于更大的范圍(紅色部分)
筆者基于自己的理解整理了一個表格,來描述不同ALife形式/基質的不同。
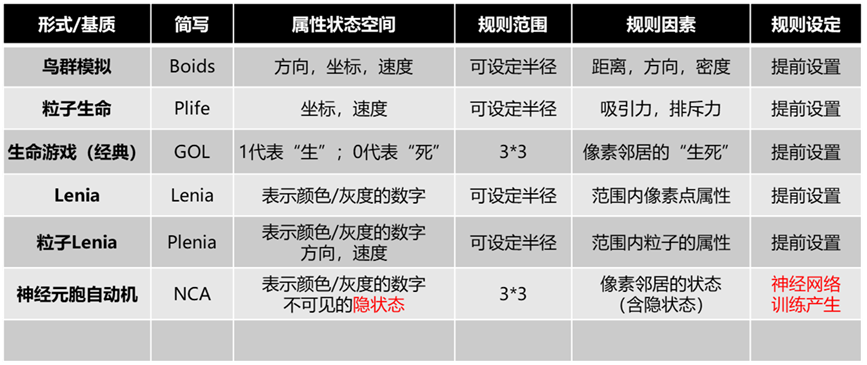
ALife常見形式/基質一覽
從上表可以看出,主流的ALife的底層結構都是相同的,都表現為基于一定的規則進行主體狀態/行為模擬,允許靈活配置屬性或規則環境參數,通過自組織的互動最終產生復雜的全局行為。從一定意義上來講,ALife就是某種ABMS(Agent Base Modeling Simulation)——多主體建模模擬。這也符合我們對生命的發現:
生命是一種涌現,即微觀個體通過自組織組成宏觀的“生命”。
AI自動發現ALife
最近,Sakana AI聯合來自MIT、OpenAI、瑞士AI實驗室IDSIA等機構的研究人員,公開了“自動搜索人工生命”的新算法[2]。許多公眾號對該論文進行了解讀,并紛紛采用“震驚體”作為標題,發表了大量文章。這些文章似乎在暗示AI已經揭開了生命起源的秘密,引發了廣泛關注。但筆者仔細閱讀該論文后,發現其核心邏輯并不復雜。
筆者用之前提到的AI寵物機器人Moflin做個例子,將圖片提供給AI,得到的回答是:這不是生命。
AI對Moflin是否為生命的判斷:不是
筆者再將兔子的照片提供給AI,得到的回答是:這是生命。從AI的完整回答可以看出,目前AI對圖片是否具有生命的判斷和人基本一致,且有一定的邏輯。
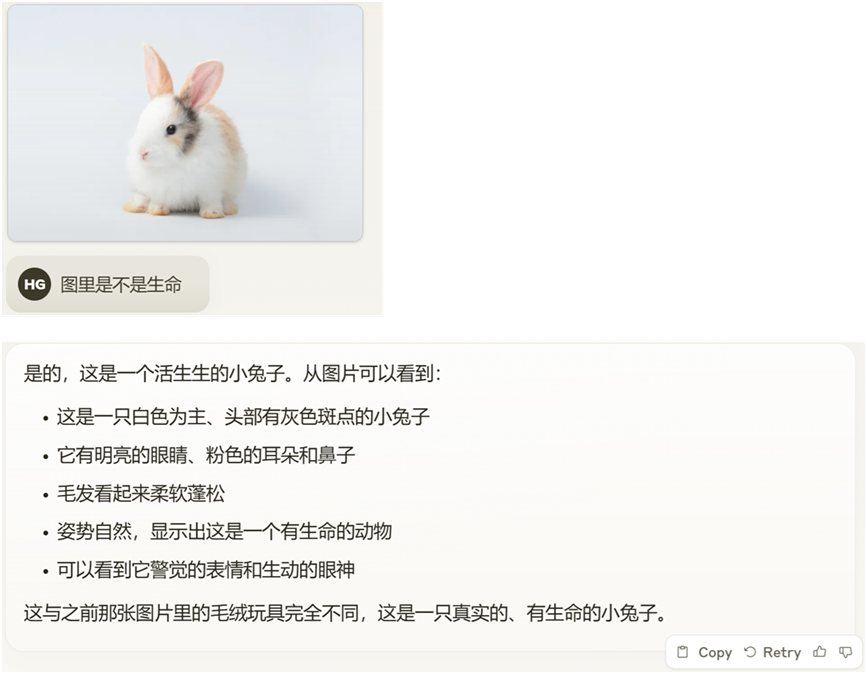
AI對兔子是否為生命的判斷:是
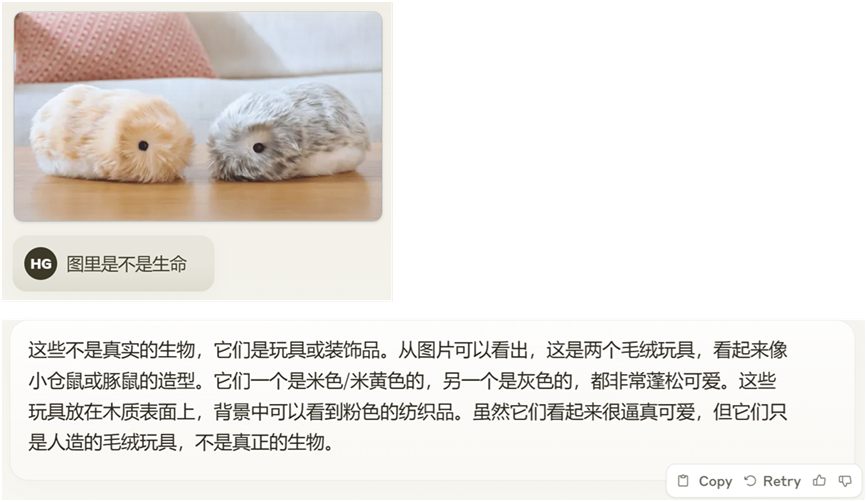
類似地,筆者再將兩張ALife的圖片提供給AI。
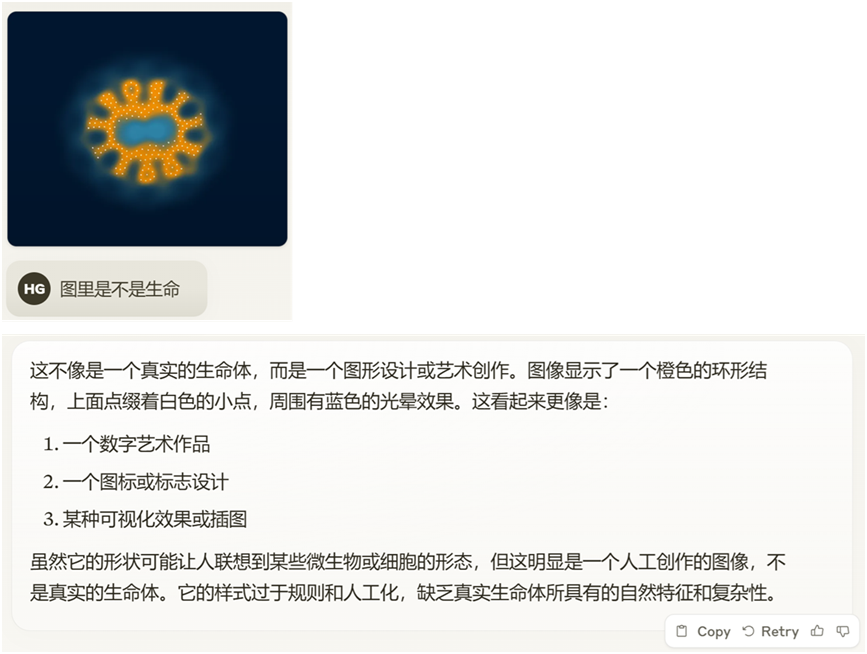
AI對一種ALife是否為生命的判斷:不是
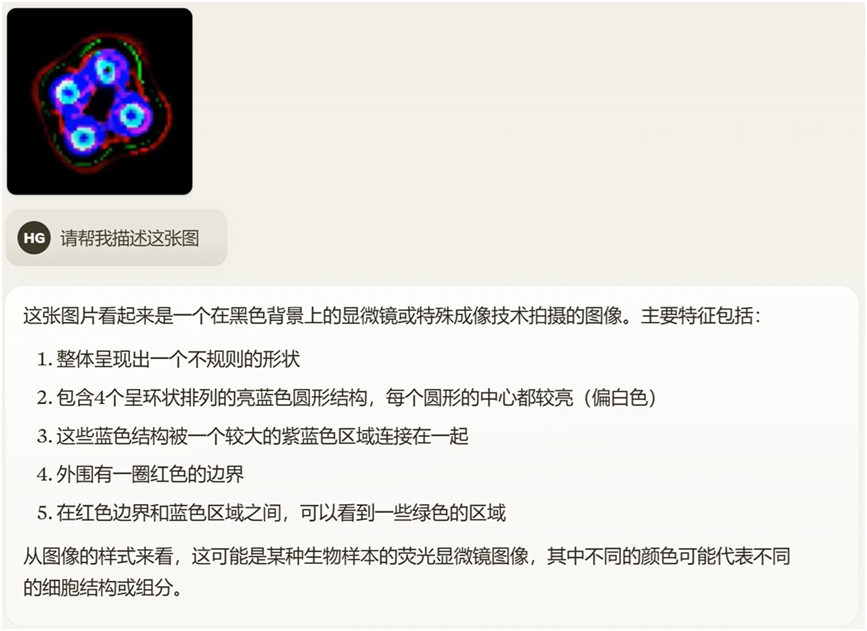
AI對另一種ALife是否為生命的判斷:是
從AI給出的回答可以看出,AI是有一定能力從視覺角度來區分“生命”的,會將圖片內容與大模型已知生命形式和特征進行相似性比較,進而判斷圖中對象是否具有“生命”。同樣,這也是“自動搜索人工生命”算法的底層邏輯。
具體而言,“自動搜索”算法解決的問題就是“如何判斷一個或多個物體是不是生命”。目前ALife的形式/基質只能通過視覺表達,所以這里的“自動搜索”就是讓AI學會通過“視覺”來判斷哪個圖像更像生命。
由于生命是“活”的,在時間尺度上是會呈現一定的動態變化,所以自動搜索是搜索時間序列的一系列圖像,給這些圖像或視頻與生命特征的相似性程度進行打分,基于相似分數來判定其是否是“生命”。這種評估是基于模型從大規模數據中學習到的統計模式,而不是真正的“判斷”能力。用一句話總結,“基礎模型”是通過視覺-語言基礎模型對模擬生成的圖像序列進行評估,從而利用人工智能高效地搜索有趣的ALife模擬。
“自動搜索人工生命”算法雖然底層邏輯很簡單,但提供了一個很好的框架。框架內包含三種搜索機制:目標導向搜索(尋找符合特定描述的生命形式),開放式進化搜索(尋找能持續有新穎性的ALife模擬),以及多樣性照明搜索(探索整個可能的生命形式空間)。借助這個框架,有望揭示:究竟是什么樣的規則,對產生“生命”現象起到關鍵作用。
原文提供了網站可視化自動搜索ALife發現的關鍵參數等內容[3],以及提供了實現的源代碼,涵蓋了本文介紹的所有形式/基質,并且還可基于接口繼續擴展更多的類型[4]。
可視化網站截圖,關鍵參數對形成“生命”具有關鍵作用
ALife的啟示意義
前陣子有一個爆火的視頻,講述的是一群螞蟻在搬運工字形物件穿越障礙的速度快于人類水平。這似乎預示著螞蟻擅長集體解決難題,在某些情況下甚至比人類更聰明!
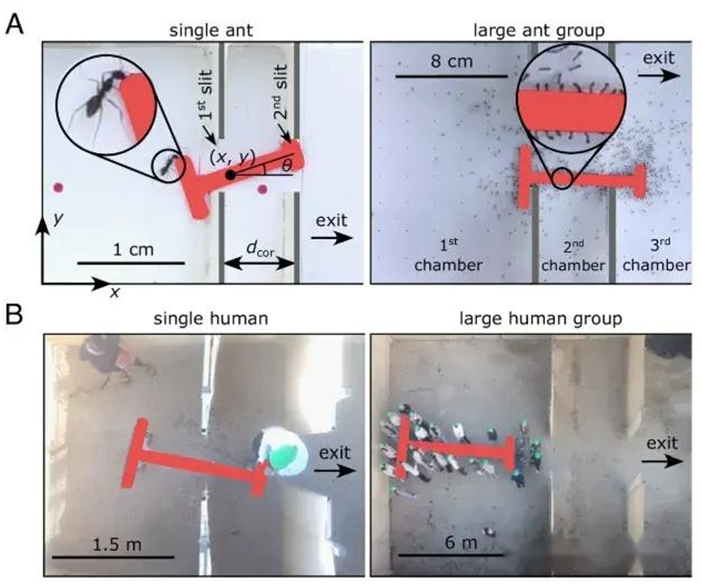
螞蟻和人類解決搬運問題的示意圖,來源:網頁[www.pnas.org/doi/10.1073/pnas.2414274121]
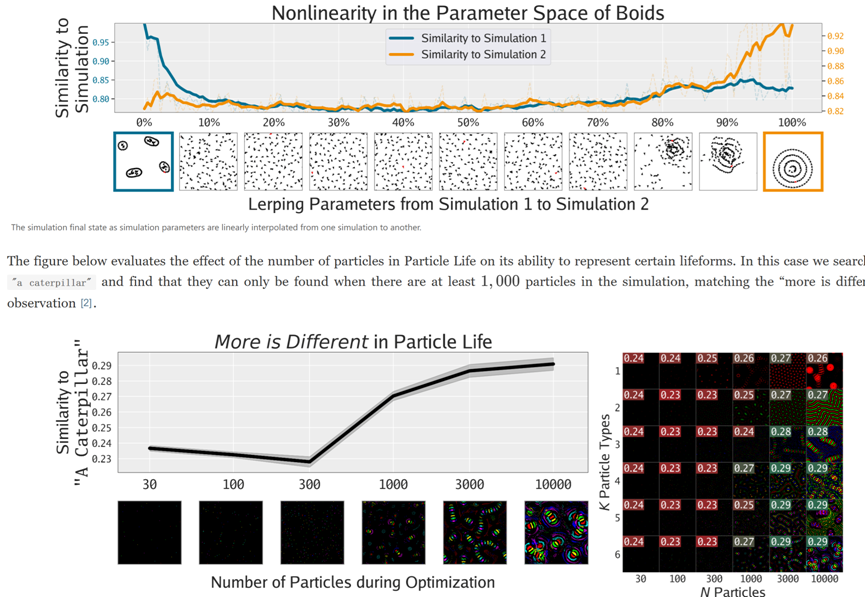
從某種意義上來講,ALife和螞蟻搬運的案例都提示我們,智能和生命可能都是一種涌現,都是從簡單的局部規則可以涌現出復雜的全局行為模式。這也呼應了Anderson在‘More is Different’一文中提出的觀點:復雜系統的行為往往無法僅通過其組成部分的性質來預測。
從個體自組織以及他們之間的非線性關系,我們可以得到以下啟發:
1.復雜系統源于簡單規則。復雜的全局行為可以從簡單的局部規則涌現,無需中央控制。
2.自組織與適應性。涌現現象展示了系統如何通過自組織適應環境變化,個體之間通過局部的互動不斷調整狀態,以應對外部的變化,保持整體系統的穩定性與功能。
3.去中心化的力量。去中心化系統能夠通過局部交互實現全局目標,避免集中式控制可能帶來的單點故障。
4.生命與智能的本質。生命和智能這些特征可能并非從一開始就設計好的功能,而是通過自組織和進化過程涌現出來的。
5.創新與創造力。創新和創造往往是涌現的結果,它們源自個體的多樣性、個體間的交互和競爭。
6.系統思維的視角。理解復雜系統需要從整體和局部兩個層面進行分析,才能全面理解系統的運作方式。
結語
研究ALife提供了一個很好的數學化視角,用于直觀分析生命與智能的涌現過程。同時,ALife的研究框架也為研究者和愛好者提供了一個重要的平臺,促進了在同一領域內的知識共享與交流。
More is different。
多者異也。
參考資料
[1] 網頁[zh.wikipedia.org/zh-sg/%E4%BA%BA%E5%B7%A5%E7%94%9F%E5%91%BD]
[2] 網頁[arxiv.org/abs/2412.17799]
[3] 網頁[asal.sakana.ai/
[4] 網頁[github.com/SakanaAI/asal]
本文為科普中國-創作培育計劃扶持作品
作者:韓司陽、彭晨
審核:張江 北京師范大學系統科學學院教授
出品:中國科協科普部
監制:中國科學技術出版社有限公司、北京中科星河文化傳媒有限公司

來源: 科普中國-創作培育計劃
內容資源由項目單位提供
