
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 Engineering前沿
Engineering前沿 

一直以來,水稻收獲環節的效率瓶頸制約著農業智能化生產的進一步發展。傳統方式下,無人駕駛收獲機需頻繁進行卸糧轉運,作業連貫性差,嚴重影響整體收獲效率。羅錫文院士團隊精準錨定這一關鍵難題,全力投入研發,成功打造出一套采用履帶式收獲機和運糧車為平臺的自動協同收獲–轉運系統。相關成果以“Dual-Unloading Mode Autonomous Operation Strategy and Cotransporter System for Rice Harvester and Transporter”(基于雙卸糧模式的水稻協同收獲轉運策略及系統研究)為題發布于中國工程院院刊《Engineering》,華南農業大學農業機械與裝備關鍵技術教育部重點實驗室丁凡為第一作者,張聞宇為通訊作者。

圖1. (a) HWU 和 (b) TFU 的作業場景。
團隊創新性提出 “收獲機等待卸糧(HWU)” 和 “運糧車跟隨卸糧(TFU)” 的雙卸糧模式,構建了高效的收獲–卸糧–轉運(HUT)策略。HWU 模式保障收獲機在糧倉滿載時有序等待運糧車,適用于田邊空間有限的卸糧和轉運;TFU 模式則使收獲機在作業中無需停車即可完成卸糧,極大保證了作業流暢性。兩種模式靈活配合,依田塊實際情況切換,有效減少收獲機非作業時長,大幅提升作業效率。
在技術實現層面,針對雙模式收獲–卸糧–轉運作業非順序性和高復雜性的特點,團隊基于有限狀態自動機(FSM)原理,將其統一至一個循環狀態框架內,將復雜的流程切分為基本動作,提煉出關鍵狀態節點,通過狀態變量決定循環分支的走向,提高流程的可解析性,并為后續的進一步優化和擴展提供良好的基礎。
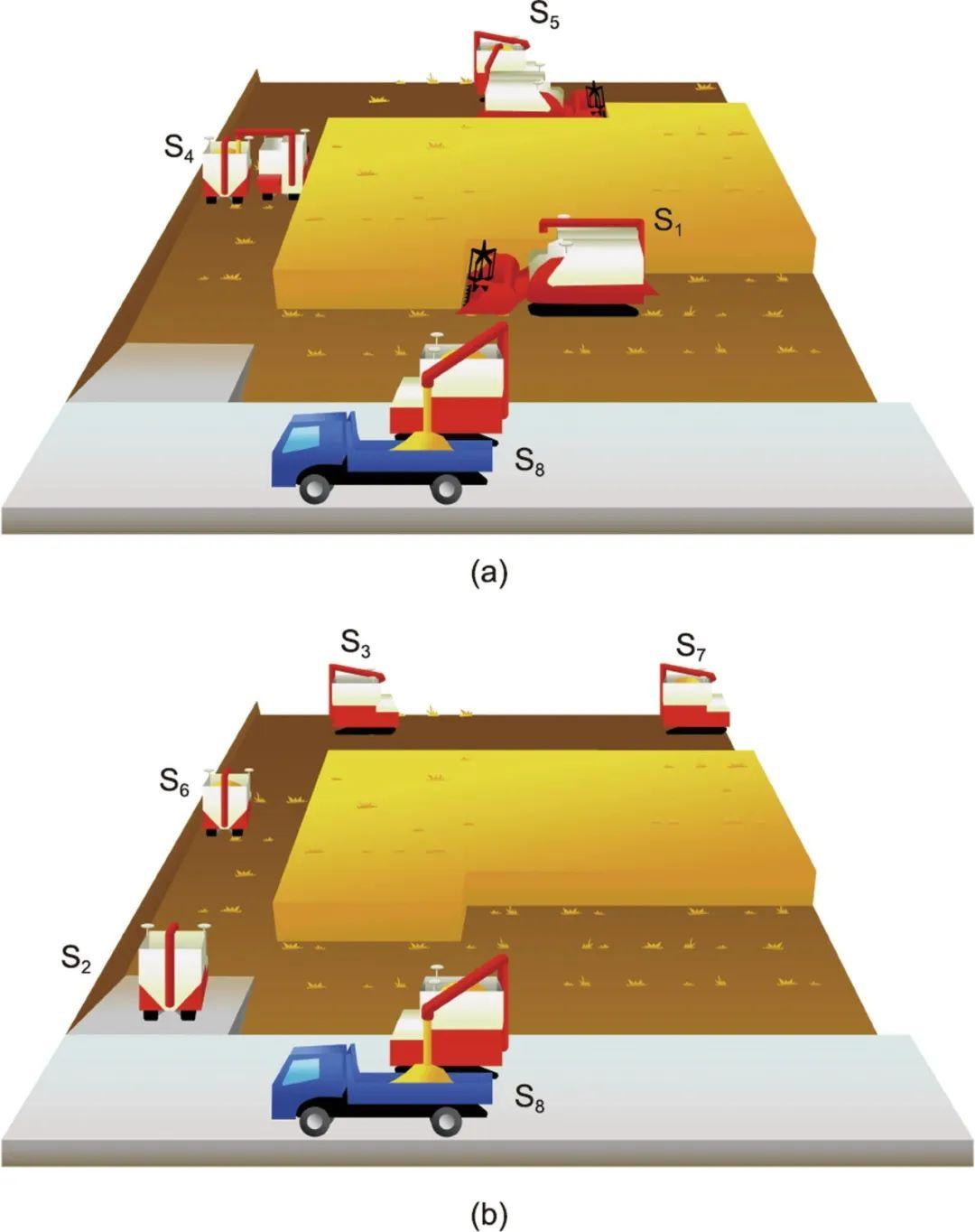
圖2. HUT 協同作業的主要階段(S1-S8)和流程。(a)收獲機和運糧車協同卸糧的示意圖。(b)運糧車的五個停車狀態。
最后通過仿真與田間試驗充分驗證了該策略的可行性。利用MATLAB Simulink 和 Stateflow 模塊構建的仿真模型清晰呈現了雙機的狀態轉移過程,表明了HUT策略及其邏輯框架的有效性。在華南農業大學增城教學科研基地水稻無人農場進行的田間試驗表明:收獲過程順利完成 6 次 TFU 和 1 次 HWU,運糧車成功卸糧 4 次,在1.9 m收獲幅寬及0.8 m?s?1收獲機速度的條件下,收獲效率達到了0.42 hm2?h?1,較單收獲機效率提升26.0%,比僅用HWU模式提高9.9%。
羅錫文院士團隊的這一成果,得到了國家重點研發計劃項目、國家自然科學基金項目、國家糖料產業技術體系、山東省重點研發計劃項目的資助,為水稻協同收獲提供關鍵理論與技術支撐,為無人農場收獲環節開辟新路徑,有力推動農業機械化、智能化進程。展望未來,團隊將持續深耕,聚焦智慧農場耕種管收智能化作業等關鍵領域,不斷拓展農業科技前沿,為保障糧食安全、推動農業現代化持續奮進,引領農業科技發展新方向。
文章信息:
Dual-Unloading Mode Autonomous Operation Strategy and Cotransporter System for Rice Harvester and Transporter
基于雙卸糧模式的水稻協同收獲轉運策略及系統研究
作者:
丁凡,羅錫文,張智剛,胡煉,吳欣洛,鮑開元,張嘉銳,苑炳軒,張聞宇
引用信息:
Fan Ding, Xiwen Luo, Zhigang Zhang, Lian Hu, Xinluo Wu, Kaiyuan Bao, Jiarui Zhang, Bingxuan Yuan, Wenyu Zhang. Dual-Unloading Mode Autonomous Operation Strategy and Cotransporter System for Rice Harvester and Transporter. Engineering, https://doi.org/10.1016/j.eng.2024.11.006
開放獲取全文
https://www.engineering.org.cn/engi/EN/10.1016/j.eng.2024.11.006
來源: Engineering前沿
