
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 中國自動化學會
中國自動化學會 隨著科學技術的迅速發展,機器人技術已經成為科學研究最為活躍的領域。移動機器人作為機器人學中的一個重要分支,代表著機電一體化的最高成就。
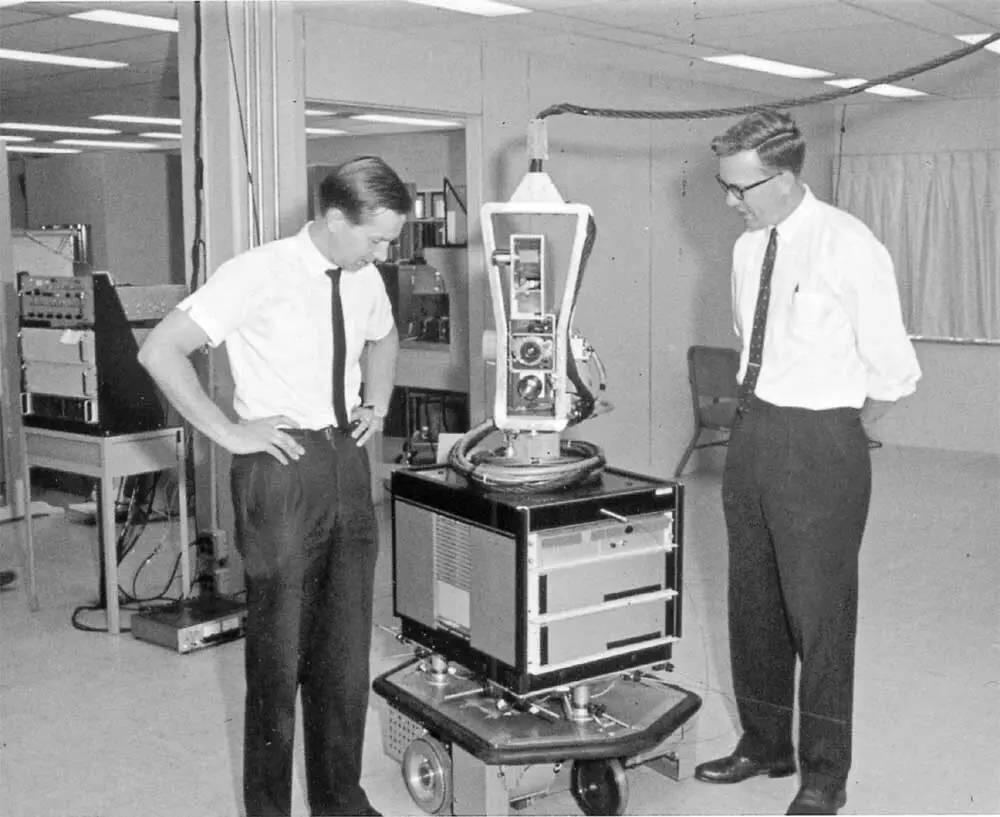
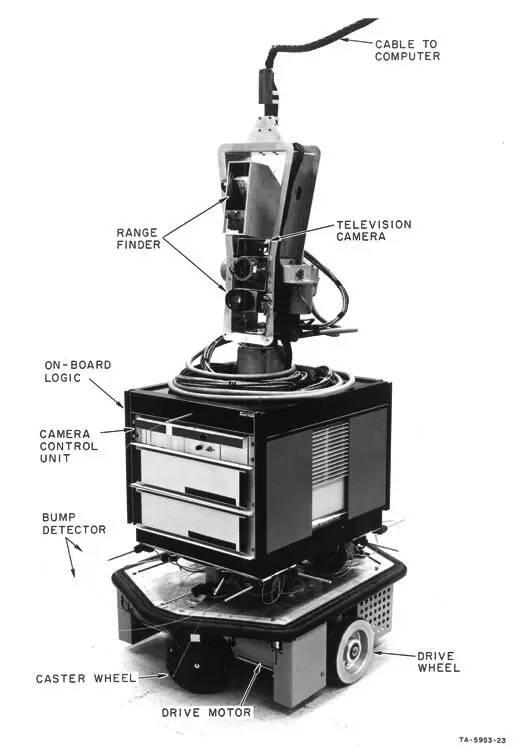
早在60年代,世界各國就已經開始了關于移動機器人的研究。1968年,斯坦福研究所發明了世界上第一臺移動機器人。
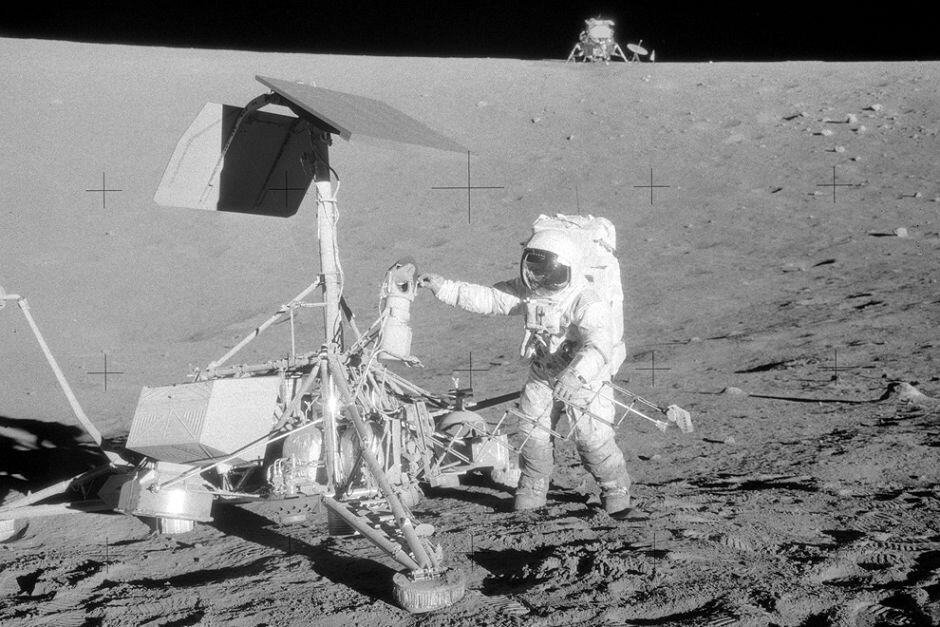
60年代后期,美國和蘇聯研制了月球探測移動機器人,其操作器在地面的遙控下,完成了在月球上的多個重大任務。
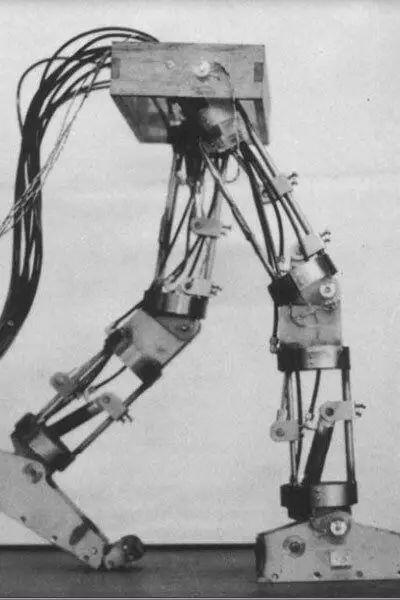
70年代初期,日本早稻田大學研制出具有仿人功能的兩足步行機器人,是移動機器人發展的重大里程碑。
進入90年代,移動機器人開始應用于各個領域,向實用化進軍。近年來,移動機器人逐漸智能化,可以替代人類從事許多危險性工作,為我們的生活帶來了極大的便利。
隨著智能化時代的到來,移動機器人以其犯錯率低、節約成本、可持續工作、工作效率高等優勢,成為了我們生活中必不可少的角色。過去幾十年間,機器人逐漸開始代替部分人工參與到工作中。倉儲移動機器人出色的打包、分揀、搬運等能力,使其在物流領域發揮著巨大作用。 地震后廢墟結構極不穩定,極易對廢墟中的救援人員造成危險,排險移動不僅保障了救援人員的生命安全,更是在危急時刻提高了被困人員的生存率。在一些火災事故中,由于求助不及時、消防員無法及時救災等原因而導致不可挽回的慘案時常發生,此時消防機器人便可發揮決定性的作用。除此之外,機器人在工業、農業、醫療、服務等行業中也得到廣泛了的應用。
移動機器人是一個集環境感知、動態決策與規劃、行為控制與執行等多功能于一體的綜合系統,下面我將從環境感知、自主定位和路徑規劃這三個機器人技術的重點問題介紹移動機器人的關鍵技術。
目前,移動機器人在室內環境中,以激光雷達傳感器和其他傳感器共同作用的自主環境感知技術已相對成熟,而在室外應用中,由于環境的多變性及光照變化等影響,環境感知的任務相對復雜的多,使得多傳感器融合技術已成為機器人環境感知面臨的重大難題。
移動機器人要實現自主行走,定位也是其需要掌握的核心技術之一。近年來,SLAM技術發展迅速,已成為移動機器人導航的主流定位技術。行業內領先的移動機器人,大多采用了SLAM技術。
對于智能移動機器人來說,路徑規劃是其必須而且非常重要的一項技術,通過最優的路徑規劃,能夠保證機器人從起點開始尋找一條最優的無碰路徑直到抵達終點。
當前,我國移動機器人的研究主要集中在信息處理、導航控制上。隨著其智能化程度的提高和成熟,移動機器人必然要向著具有操作能力的方向發展。給移動機器人 裝備 操作機械手 等 是目前該領域的研究熱點和發展方向。隨著移動機器人應用領域的不斷拓展,其工作復雜度加重,對移動機器人的要求不再局限于單個機器人,多移動機器人系統的研究也已成為研究的另一個熱點。
隨著互聯網時代的到來與人工智能的普及,移動機器人必將向著網絡智能化、情感化發展。并為各個特殊領域發揮其作用。
當今時代,網絡已經遍布了我們生活的各個角落,移動機器人聯入網絡系統也是大勢所趨。研制網絡化移動機器人,就是以計算機網絡作為研究的載體,對移動機器人設定相關的指令進行有效的控制,通過網絡化技術的研究,將極大地推動移動機器人的發展。
根據不同的領域對于機器人的需求程度不同,對于一些高風險、高精度等工作,均可以讓智能移動機器人進行代替,這樣既保證了人類的安全,也能夠提高工作的效率。總之它的研究領域是十分廣闊的,且在研究的過程中是有利于社會的發展的。機器人與人類最大的不同,就是機器人是根據特殊的程序設定出來,不具有情感。目前,情感移動機器人已經成為了當前研發人員研究的重點。高智商高情商的移動機器人一旦被研發出來,將會使整個人類社會產生巨大的改變。
來源: 武漢工程大學電氣信息學院
內容資源由項目單位提供
