
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 天文在線
天文在線 
新型恒星際導航系統
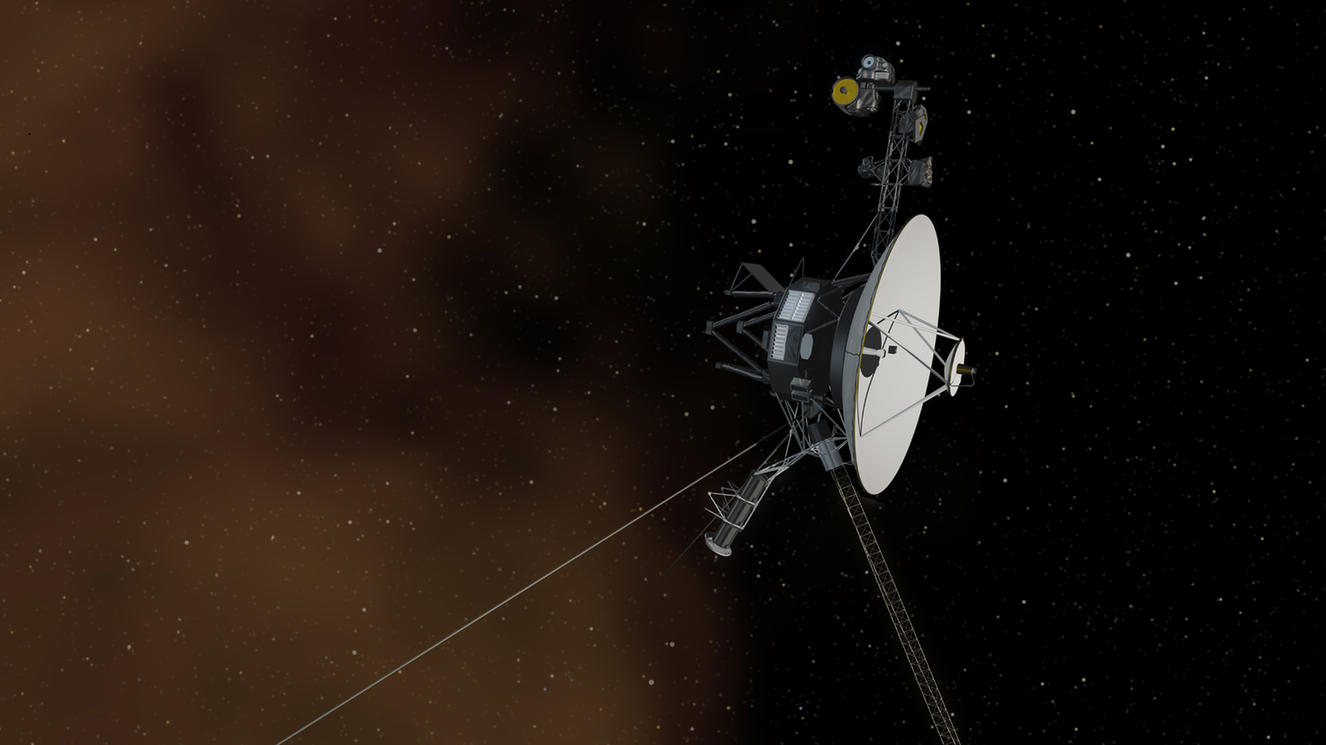
藝術家描繪的駛向星際空間的航海家探測器(供圖:NASA/噴氣推進實驗室)
宇宙浩瀚無邊。人類若想探索銀河系深處,一套精確可靠的導航系統必不可少。有人提出一個新的構想,以盡可能簡單易行的技術實現星際導航,即利用成對的恒星建立一套星系級的參照系統。

太陽系內的行星際航行依靠的是以地球為基點的導航系統。地面發送電波給飛船,飛船接收并發送回波,然后通過兩個信號間的延遲時間計算出飛船與地球的距離;同時我們對飛船的實時監測可以得到它在空中的位置,結合這兩方面的信息(飛船在空中的位置以及它與地球的距離)我們就得到了飛船在太陽系的精確定位,并把這個數據傳到飛船上。

估算飛船的航行速度則要靠電波的多普勒效應。地球上散布著信號接收器,飛船發出的回波到達這些接收器的時間也不同。測量不同接收器的數據并結合飛船的位置參數,我們將得到一組完整的六個維度的數據,包括飛船的三維坐標和三維速度。
這個方法能夠奏效,全賴地球上不斷收發信號的雷達網。但它只能為太陽系內的飛船提供導航,以及勉強應付已飛出太陽系的航海家雙子探測器。
恒星際航行的飛船則需要新的自主導航系統。理論上來講,飛船自帶的時鐘脈沖和陀螺儀可以做到這一點。但對于動輒耗時數十年的恒星際航行而言,一個微小的計算失誤,或一次沒有十足把握的決定,都將會導致飛船偏離航線。
另一個選擇是利用脈沖星來定位。脈沖星不停的旋轉使它呈現有節律的閃爍或脈動。由于每顆脈沖星的自轉周期各不相同,它們就像深空中的燈塔,為飛船指引方向。很可惜,這個方法只適用于太陽系外圍一個很小的區域,因為星際塵埃會干擾我們測量脈沖星的自轉周期。而一旦測量失誤搞混了這些星星,我們將迷失在渺渺繁星之中。
小飛俠定位法:右邊第二顆星星
如上所述,我們需要一個精準可靠又簡單易行的辦法來幫助星際飛船確定它們的位置。發表的一篇預印本文章,提出了這樣一個方案:直接參照恒星導航。
該技術基于古老的視差原理。豎起一根手指放在鼻子的前方,輪流閉上一只眼,用另一只眼去看你的手指,你會看到它似乎在來回搖擺。這就是觀察點改變引起的視差。如果用同樣的方式去觀察遠處的物體,你會發現搖擺的幅度要小得多。
正是基于視差原理,科學家得以測量各個恒星到地球的距離。同理,漂泊在外的飛船也可以利用這個原理進行定位。在飛船發射前,我們可以預先載入所有鄰近星系里已知恒星的位置信息。隨著飛船高速駛離太陽系,系統逐對計算恒星的相對位置。這時距飛船較近的恒星似乎發生了較大的位置偏移,而更遠處的恒星位置則相對固定。
將實時測量的數據與地球上測量的原始數據進行比對,飛船就能識別出這些恒星,并計算出飛船與每一顆星星的距離,從而得到精確的三維坐標。
確定航速:相對論效應
計算飛船的航速要稍微復雜一點,計算的基礎是狹義相對論提到的一個奇怪的扭曲效應。當你以足夠快的速度運動時,由于光速恒定不變,你看到的物體其實并不在它們實際的位置上。更確切地說,它們看上去的位置沿著你運動的方向向前偏移了。這就是像差效應,我們在地球上就能觀察到。地球圍繞太陽旋轉的時候,地球上的我們會觀察到星星的位置在輕微地來回擺動。

飛船必須高速航行,否則星際旅行就得耗時數千年,而非數十年了。而只要航速足夠快,飛船就能測量到像差效應,并知道哪顆星星并非處于理論上它應該在的位置上,以及它的位置偏移了多少,并由此推算出飛船的三維速度。
運用視差測量法,飛船得到實時的六維坐標,告訴它此刻身在何處,正要去往何方。問題是通過這個方法得到的坐標有多精確呢?據該文章所述,假設飛船能測量的恒星數為20顆,測量精度為1角秒(度量單位,1角秒=1/60角分,1角分=1/60度),那么坐標的誤差范圍就在3個天文單位以內,速度的誤差范圍則小于2公里/秒(即1.2英里/秒)。
一個天文單位就是太陽到地球的平均距離,即9,300萬英里(1.5億公里),所以3個天文單位的誤差約等于2.79億英里(4.5億公里)。聽起來似乎相差甚遠,但是比起數千個天文單位的恒星間距離來看,這樣的誤差基本可以忽略不計。

更何況我們能夠精確定位的恒星可遠遠不止20顆,我們載入飛船系統的可是數以億計的恒星數據呢,如此看來飛船的定位可以達到相當的精度。
剩下來的事情就是造一艘可以遨游于恒星間的飛船了。
BY:Paul Sutter
FY: Renee
如有相關內容侵權,請在作品發布后聯系作者刪除
轉載還請取得授權,并注意保持完整性和注明出處
來源: 3.原文來自:https://www.
