
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 成信大機器人
成信大機器人 第一部分:ABB機器人型號及基本組成
一、ABB機器人型號與含義
左邊第一位數:指機器人的大小;左邊第二位數:指的是所屬系統。
IRB 120僅重25kg, 最大承載為3kg,常用于搬運、雕刻、噴涂等;
IRB 1400承載較小,最大承載為5kg,常用于焊接;
IRB 2400承載較小,最大承載為 7kg ,常用于焊接;
IRB 4400承載較大,最大承載為60kg 常用于搬運或大范圍焊接;
IRB 6400承載較大,最大承載為200kg,常用于搬運或大范圍焊接。
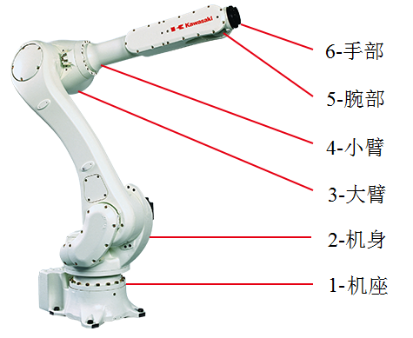
二、ABB機器人基本組成
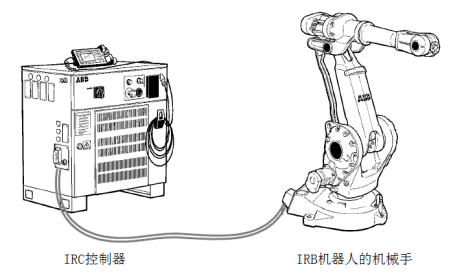
ABB 機器人是由兩部分組成:機械手和控制器,且無論是何種型號,機器人控制部分基本相同。
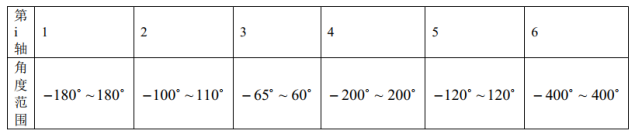
機械手是由六個轉軸組成的空間 6 桿開鏈機構,理論上可以達到運動范圍內的任何一點,下表中列舉了各軸的轉動范圍,每個轉軸均帶有一個齒輪箱,機械手運動精度可達到±0.05mm~±0.2mm。
控制器包括主計算機板、機器人計算機板、快速硬盤、網絡通信計算機、示教器、驅動單元、通信單元等組成。

第二部分:工業機器人的核心參數
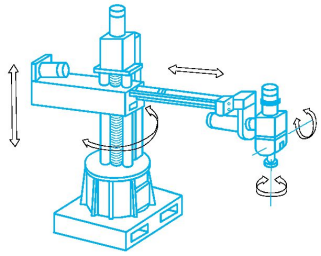
5自由度機器人
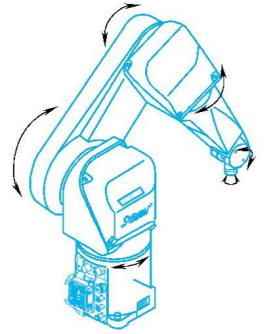
6自由度機器人
定位精度
是指機器人手部實際到達位置與目標位置之間的差異,用反復多次測試的定位結果的代表點與指定位置之間的距離來表示。
重復定位精度
是指機器人重復定位手部于同一目標位置的能力,以實際位置值的分散程度來表示。實際應用中,常以重復測試結果的標準偏差值的3倍來表示,它用于衡量一系列誤差值的密集度。
工作范圍
是指機器人手臂末端或手腕中心所能達到的所有點的集合。為了真實地反映機器人的特征參數,一般工作范圍是指不安裝末端操作器的工作區域。
工作范圍的形狀和大小是十分重要的,機器人在執行某作業時可能會因為存在手部不能到達的作業死區而不能完成任務。
最大工作速度
指工業機器人自由度上最大的穩定速度,也指手臂末端的最大合成速度。工作速度越快,工作效率就越高。但是,工作速度越快就要花費更多的時間去升速和降速。
承載能力
承載能力不僅決定于負載的重量,而且與機器人運行的速度、加速度的大小和方向有關。 為了安全起見,承載能力這一技術指標是指高速運行時的承載能力。承載能力不僅指負載,而且包括了機器人末端操作器的質量。
第三部分:工業機器人關節機構
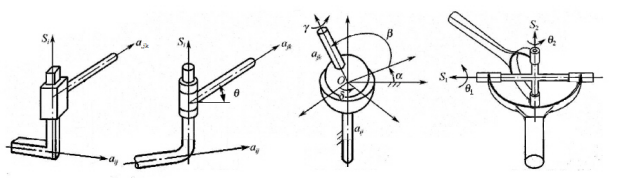
a)移動關節(P) b)轉動關節(R) c)球面關節(S) d)虎克鉸關節(T)
四種關節類型
六關節機器人
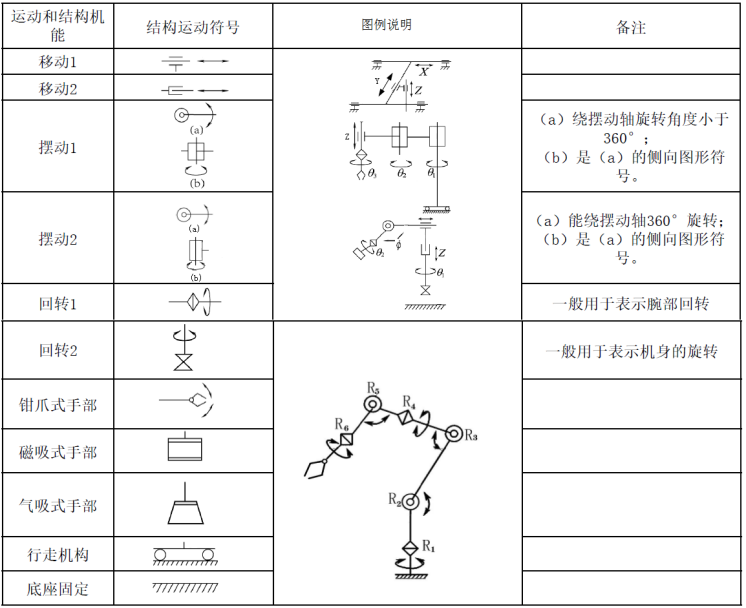
工業機器人結構運動簡圖
第四部分 :工業機器人分類
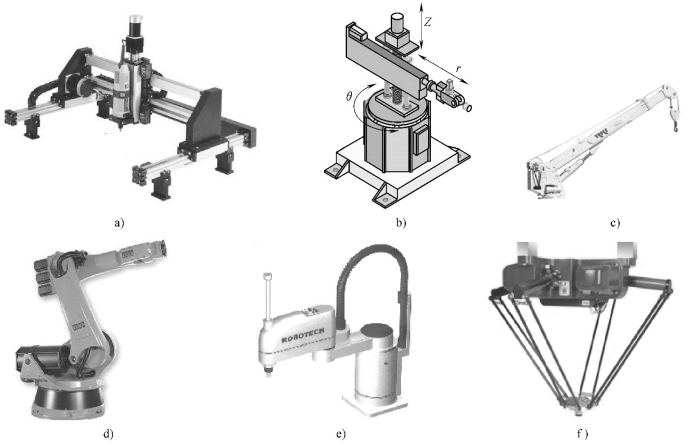
a)直角坐標型 b)圓柱坐標型 c)球坐標型 d)多關節型 e)平面關節型 f)并聯型
工業機器人類型
1)直角坐標型機器人的性能
特點:在直線方向上移動,運動容易想象;通過計算機控制實現,容易達到高精度;占地面積大,運動速度低;直線驅動部分難以密封、防塵,容易被污染。
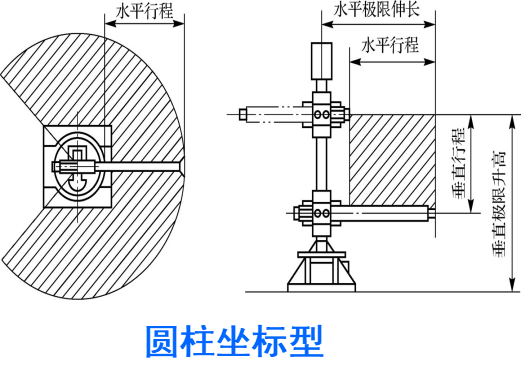
2)圓柱坐標型機器人的性能
特點:運動容易想象和計算,直線部分可采用液壓驅動,可輸出較大的動力;能夠伸入型腔式機器內部,它的手臂可以到達的空間受到限制,不能到達近立柱或近地面的空間;直線驅動部分難以密封、防塵;后臂工作時,手臂后端會碰到工作范圍內的其他物體。
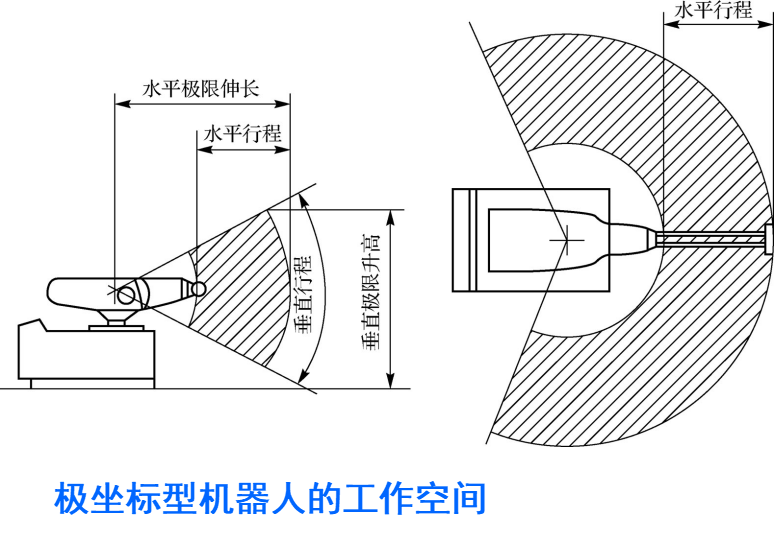
3)極坐標型機器人的性能
特點:中心支架附近的工作范圍大,兩個轉動驅動裝置容易密封,覆蓋工作空間較大;坐標復雜,難于控制;直線驅動裝置仍存在密封及工作死區的問題。
4)多關節坐標型機器人的性能
特點:關節全都是旋轉的,類似于人的手臂,是工業機器人中最常見的結構;它的工作范圍較為復雜。
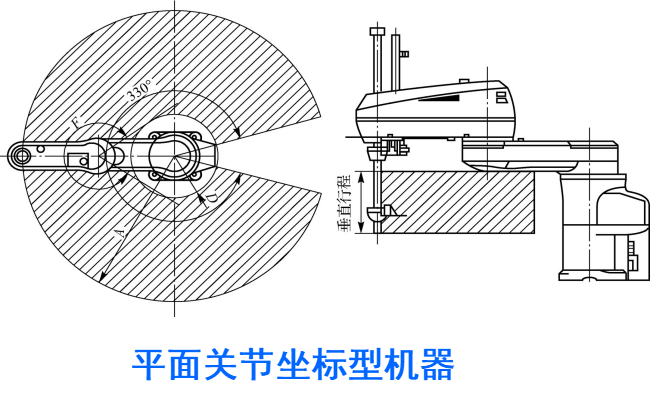
5)平面關節坐標型機器人的性能
特點:前兩個關節(肩關節和肘關節)都是平面旋轉的,最后一個關節(腕關節)是工業機器人中最常見的結構;它的工作范圍較為復雜
按控制方式劃分
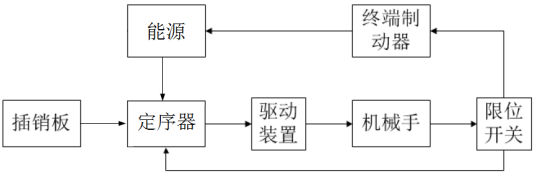
1)非伺服控制機器人
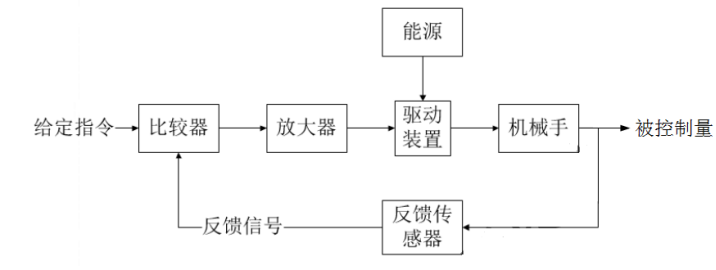
2)按控制方式劃分
3)按驅動方式劃分
①液壓驅動
使用液體油液來驅動執行機構的。負載能力大,結構緊湊,傳動平穩,但不宜在高溫或低溫場合作業。
②氣壓驅動
以壓縮空氣來驅動執行機構的。空氣來源方便,動作迅速,結構簡單。常用于負載較小的場合。
③電力驅動
利用電動機產生的力矩驅動執行結構的。電力驅動易于控制,運動精度高,成本低。
④新型驅動
如靜電驅動器、壓電驅動器、形狀記憶合金驅動器、人工肌肉及光驅動器等。
第五部分 工業機器人末端執行器
末端執行器的定義
①機器人的末端執行器是一個安裝在移動設備或者機器人手臂上,使其能夠拿起一個對象,并且具有處理、傳輸、夾持、放置和釋放對象到一個準確的離散位置等功能的機構。
②末端執行器也叫機器人的手部,它是安裝在工業機器人手腕上直接抓握工件或執行作業的部件。包括從氣動手爪之類的工業裝置到弧焊和應用的特殊工具。
末端執行器特點:
①手部與手腕相連處可拆卸。
手部與手腕有機械接口,也可能有電、氣、液接頭,當工業機器人作業對象不同時,可以方便地拆卸和更換手部 。
②手部的通用性比較差。
工業機器人手部通常是專用的裝置,比如:一種手爪往往只能抓握一種或幾種在形狀、尺寸、重量等方面相近似的工件;一種工具只能執行一種作業任務。
③手部是一個獨立的部件。
假如把手腕歸屬于手臂,那么工業機器人機械系統的三大件就是機身、手臂和手部(末端執行器 )。
由于機器人的用途不同,因此要求末端執行器的結構和性能也不相同 。
按其功能,末端執行器可分成兩大類即手爪類和工具類。
按其智能化程度分,可以分為普通式及智能化末端執行機構。
手爪類末端執行器
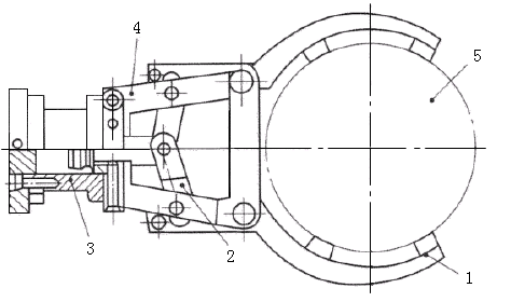
1:手指;2:傳動機構;3:驅動裝置;4:支架;5:工件
夾持類手爪
來源: 部分來自網絡
