
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 浙江省科學技術協會
浙江省科學技術協會 
想象一下:在果園里,你正操作著新購置的自助式果園噴霧機進行噴灑作業。誰承想,新設備遇到灌溉管、電線桿等障礙物,它竟寸步難行,甚至不幸“翻車”?

搭載新算法的自動農用車 本文圖片均由通訊員供圖
日前,浙江大學杭州國際科創中心彭晨研究員團隊給出了解決方案——創新研發出“自主農用車輛軌跡規劃算法”。該算法能讓農業自動駕駛車輛背負復雜機具執行噴藥、除草等精細操作時,在復雜環境中靈活轉彎,兼顧安全與效率。。
“我們主要為自動駕駛農業車輛設計了一套兼顧安全與效率的地頭轉彎軌跡規劃器,讓它能在復雜現實環境里轉得過去,而且行駛更快更穩。”彭晨介紹道。
這套規劃器的“聰明”之處,首先體現在其規劃路線的“前端”。團隊創新性地采用了新算法——覆蓋圓-地圖膨脹的混合A*。
簡單來說,這個新算法就是將農用車和它攜帶農具后的復雜構型,簡化成多個圓,把車輛復雜外形的檢測,轉換成對圓心點檢測,使得路徑搜索效率大幅提升。

配備KMS噴霧器的電動拖拉機在地頭執行轉彎軌跡的示意圖
這樣一來,農用車就能更快地算出安全的轉彎路線。彭晨指出,研究結果表明,首次規劃出安全轉彎路線的時間,比傳統方法平均縮短了約85%,響應速度可達毫秒級。這意味著即使中途遇到意外需要臨時改道,系統也能瞬間重新規劃。
不光如此,團隊還優化了路線部分的算法框架。它能給多臺協作的農用車和它們攜帶的農具,各自畫出一個“安全區”,保證它們在作業時不會互相碰撞。“計算這些‘安全區’所需的時間,比當前國際最先進的優化方法還要少91%。”彭晨補充道。

搭載新算法的自動農用車
那么,這在現實場景中應用有怎樣實實在在的優勢呢?
“過去,當拖拉機掛著長長的噴藥桿,或者收割機拖著寬大的割臺時,車輛的‘大腦’往往把它們視為分散的‘零件’,規劃轉彎路線時束手束腳,非常保守。”彭晨解釋道,“而現在,無論掛載什么工具,我們的系統都能把它們和車身視為一個靈活協調的整體來規劃。”
這意味著,以后不管是在狹窄的地頭、邊界不規則的地方,還是多臺農用車一起干活,甚至遇到突然出現的障礙物,農用車都能實時生成安全、平滑且時間最優的避障路線。
“整個過程,就像賽車在專業賽道上過彎一樣‘絲滑流暢’。”彭晨形象地描述道。
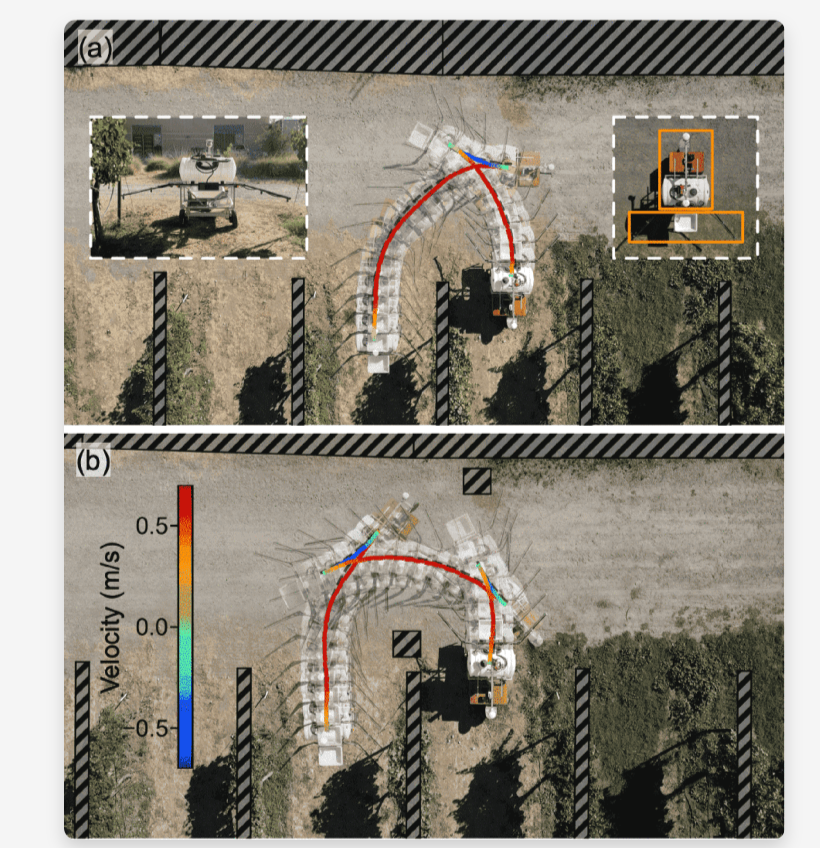
三輪機器人搭載噴霧臂的測試結果:(a) 無障礙物場景,(b) 地頭空間存在障礙物場景。圖中顯示了環境與自主農業車輛(AAV)的幾何表征,黑色虛線為規劃軌跡,彩色實線為實際軌跡(顏色代表速度差異)
前不久,“自主農用車輛軌跡規劃算法”工作還入選了IEEE/RSJ智能機器人與系統國際會議2025年會論文,今年10月將亮相大會。
“我們始終以國家戰略需求與產業應用為導向,深耕智能機器人核心技術的研發與轉化。”彭晨表示,接下來團隊會繼續打磨技術,讓更多農戶用上這樣的 “聰明農機”,讓種地變得更輕松、更高效。

來源: 潮新聞
內容資源由項目單位提供
