
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 中國宇航學會
中國宇航學會 
在空間站任務的歷次出艙活動中,空間站機械臂托舉航天員到指定位置,輔助航天員完成了各項既定任務,檢驗了航天員與機械臂協同工作的能力。中國空間站未來的建造和運營中,機械臂將繼續“助你一臂之力”,作為空間站核心裝備發揮至關重要的作用。
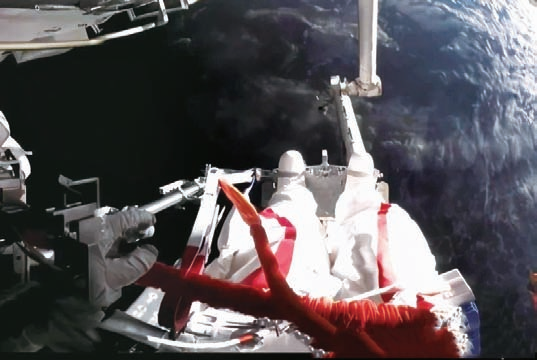
航天員劉伯明站在機械臂上
機械臂研制未雨綢繆
空間機械臂是美國20世紀70年代提出的概念,但把概念變成現實的是加拿大Spar公司。美國航天飛機的4套6自由度空間機械臂都是美國宇航局和Spar公司聯合研制的,加拿大MDA公司后續還為空間站研制了更先進和更強大的7自由度的加拿大臂2。中國1992年啟動載人航天工程,計劃三步走最終建成長期有人照料的載人空間站,我國載人航天發展也緊跟技術發展潮流,開展空間站機械臂的論證和研究工作。
空間站機械臂看起來就是兩段“棍子”,但它不僅能輔助航天員出艙活動,在空間站建造和維護,在在軌維護中也發揮著重要作用。它是一種非常精密和先進的空間機器人,集機械、電子、熱控以及視覺和動力等多個領域于一身。空間站機械臂既要拖動大質量的載荷,又要保證高控制精度,還要具備視覺識別能力甚至自主分析能力,對于白手起家的研制團隊來說研制難度空前。據報道,中國空間站機械臂的新技術比例超過80%,好在中國航天人迎難而上,最終研制出我們自己的大型高性能機械臂。

在地面進行研發試驗的空間站核心艙機械臂
我國從20世紀80年代開始跟蹤空間機械臂技術,開展了多個機械臂預研和演示項目。中國空間技術研究院自2005年開始機械臂研究工作,2007年完成機械臂原理樣機設計,2009年完成工程樣機設計,而中國空間站是2010年才正式立項的。航天人未雨綢繆開展機械臂研制,為空間站的研制工作打下了堅實的基礎。2008年完成6自由度空間站原理樣機研制后,又進一步開展7自由度機械臂的研制,讓中國空間站的機械臂達到了國際領先水平。
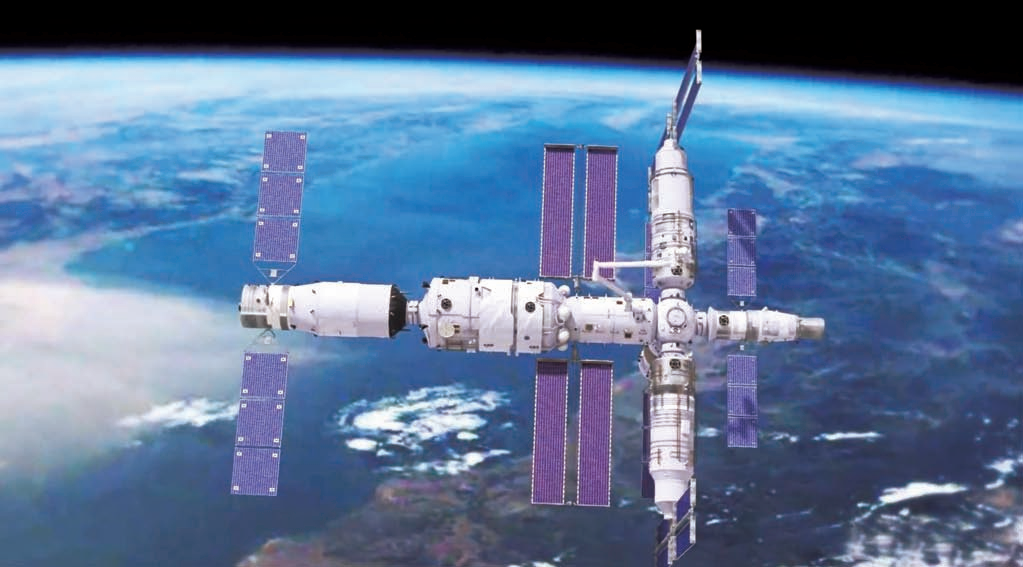
天宮空間站效果圖,上面有機械臂
中國機械臂性能先進
空間站機械臂是中國空間站系統的四大關鍵技術之一,它隨天和號核心艙發射升空,并在首次出艙任務中得到應用。嚴格地說,中國空間站遠程機械臂系統包括核心艙機械臂CMM和實驗艙機械臂EMM兩個部分,助力航天員出艙的是核心艙機械臂。中國空間站機械臂性能強大技術先進,是空間站建造應用的好幫手。
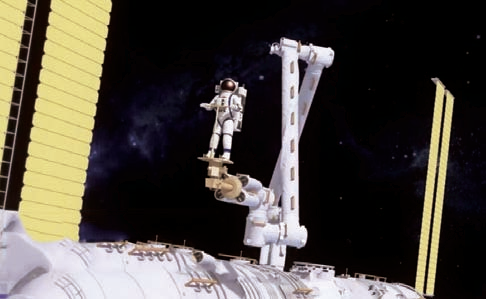
機械臂輔助航天員出艙活動
中國空間站核心艙機械臂主要用于完成重型艙段和載荷的搬運拖帶,以及大范圍轉移等任務,可以實現空間站艙段的轉位和輔助對接,航天器的捕獲和輔助對接,以及拖動航天員輔助艙外活動等功能。核心艙機械臂質量約738千克,長度約10.2米,作為一種7自由度空間站機械臂,可以完美模擬人體胳膊的活動能力,是當之無愧的太空“大臂”。核心艙機械臂還采用大負載自重比設計,最多可以拖動25噸的載荷。核心艙機械臂還有重定位能力,形象地說就是能頭尾互換地進行“爬行”,和尺蠖蠕動爬行十分相似。空間站核心艙和實驗艙上都裝有電力數據適配器,在它們的配合幫助下機械臂可以在3個核心艙段之間靈活移動,大大擴展了任務靈活性和活動范圍。
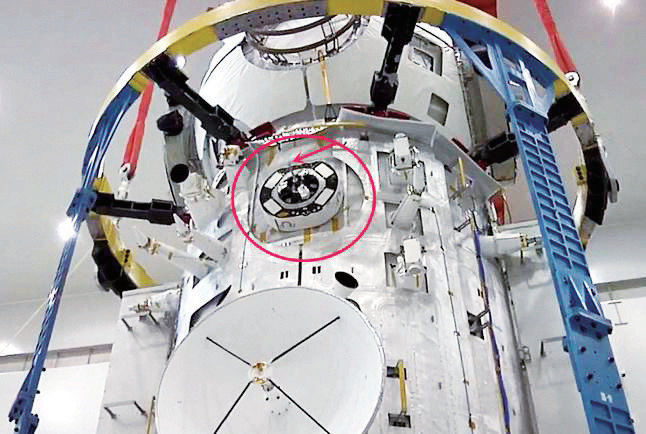
天和核心艙外的機械臂適配器
空間站實驗艙的小型機械臂也是一種7自由度機械臂,它長度約5米,最大負荷能力可達3噸,其拖動能力雖然遠遜核心艙機械臂,但它主要用于照料實驗艙的艙外實驗設施,設計上姿態和位置精度更高,可以執行更靈巧的操作。實驗艙機械臂也可以支持航天員艙外活動,但它并沒有搬運艙段的使命,也無需為了高指標設計得能力過剩。實驗艙機械臂和核心艙機械臂既可以各自獨立運行,也具備雙臂組合操作模式,實現了大范圍大負載和局部精細化操作的統一。毫不夸張地說,中國空間站機械臂系統已經達到了國際先進水平,整體水平足以媲美空間站機械臂的標桿加拿大臂2。
中國空間站的好助手
機械臂是中國空間站的支撐性核心裝備,可以對空間站艙外目標進行抓取、搬運、定位和釋放,不僅滿足艙外實驗活動的需求,還能協助航天員進行在軌建設和維護。機械臂還能用于觀察和監視艙外靜止或移動的目標,包括對空間站艙段外部進行檢測。總而言之,空間站機械臂用途廣泛,也難怪它居然成了空間站的四大核心裝備之一。

機械臂監視來訪飛行器
首先我們來看核心艙機械臂。核心艙機械臂系統已經展示了輔助航天員出艙活動的能力,航天員使用腳限位器把自己固定在機械臂末端,可以借助機械臂的幫助快速進行大范圍轉移。我國空間站機械臂的移動線速度最大可達0.6米/秒,理論上移動10米最快只需要十幾秒,這要比出艙任務中湯洪波花了約20分鐘才爬完10多米距離快得多。機械臂不僅移動速度快,而且極大地節省了航天員艙外活動的體力消耗,還能更靈活地將航天員送到預定位置,為航天員艙外活動提供高效和有力的支持,它在未來的空間站建設和運營階段將繼續用于輔助和增強航天員出艙活動能力。
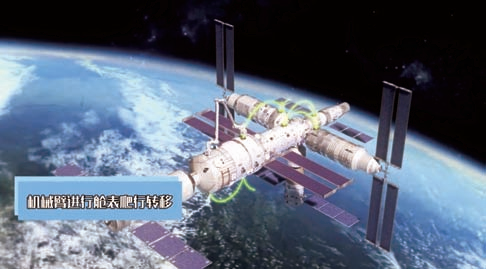
機械臂進行艙表爬行轉移
核心艙機械臂另一個重要作用是用于空間站艙段和來訪航天器的輔助對接。我國空間站三艙基本構型中兩個實驗艙都要軸向對接后,再轉位移動到節點艙側面的對接口上,機械臂高達25噸的拖動能力,就是為了滿足拖動空間站實驗艙的轉位對接要求。機械臂同樣能用于巡天號光學艙的捕獲和輔助對接,方便對光學艙的在軌維護,未來還能用于捕獲商業貨運飛船輔助對接,降低商業公司研制對接系統的難度。核心艙機械臂還能用于檢查空間站艙段的艙外狀態。基于艙外的電力數據抓取夾具,機械臂可以在各個艙段之間爬行,再加上機械臂末端配置的相機等視覺系統,可以實現對空間站外表的定期巡檢,通過實時拍攝的影像供航天員和地面控制人員觀察判斷艙體的狀態,尤其是是否有微流星撞擊孔洞或是金屬疲勞后產生的裂縫。
中國空間站的實驗艙機械臂小巧靈活,主要用于更為精細的操作任務。我國空間站核心艙和實驗艙都裝有安裝艙外暴露平臺的接口,未來將使用實驗艙機械臂完成安裝和更換艙外暴露載荷的任務。空間站艙外的其他設備,比如對地觀測相機或是天文觀測載荷以及在軌可更換單元,也需要實驗艙機械臂承擔安裝、更換和維修的重任。實驗艙機械臂還用于照料昂貴的巡天光學艙,為它更換和維修控制模塊,維護遮光罩和其他設備。另外,對于為空間站提供大部分電力的實驗艙太陽翼,同樣需要在實驗艙機械臂支持下,通過艙外活動維護桁架、太陽翼及其驅動機構。實驗艙機械臂的這些功能,不僅有效減少了出艙活動的任務量,對完成艙外空間科學實驗也是至關重要的。實驗艙機械臂還能和核心艙機械臂組合起來,更好地完成從照料艙外暴露平臺到搬運維護太陽翼等各種活動。
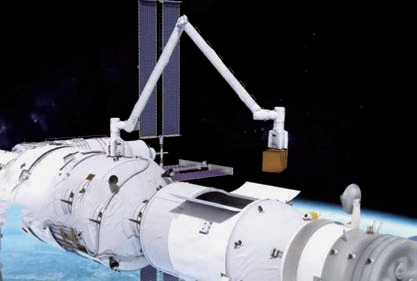
機械臂轉移貨運飛船載荷
來源: 中國宇航學會
