
 科普中國公眾號
科普中國公眾號
 科普中國微博
科普中國微博

 幫助
幫助
 李傳福
李傳福 
作者:史湘綺 李傳福
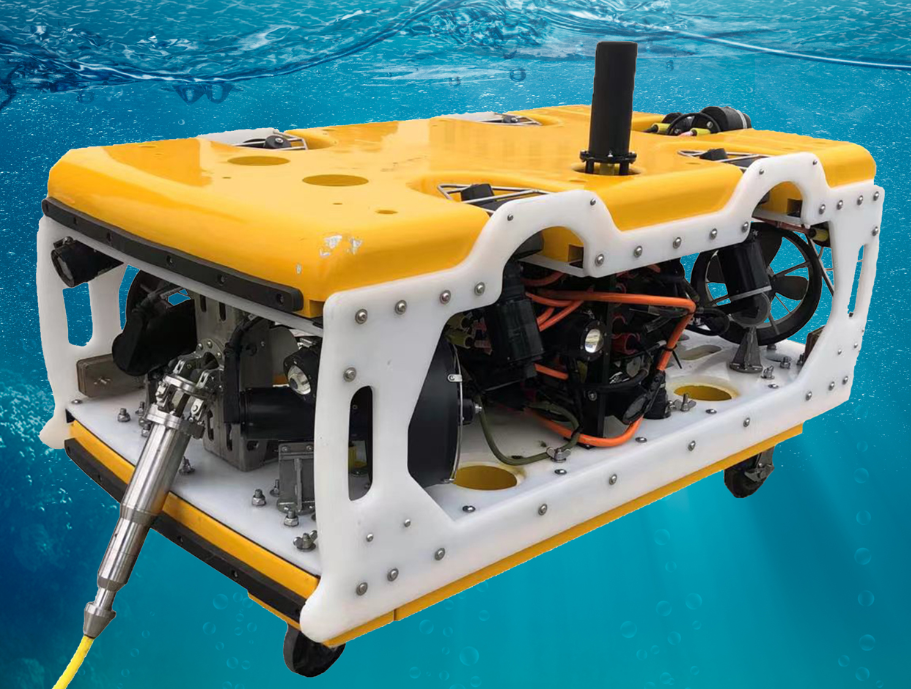
在當今快速發展的科技時代,水下工程技術正成為全球關注的焦點之一。近期,我國在這一領域取得了重大突破——首臺國產水下敷纜機器人成功完成了下水測試,其作業速度達到了令人驚嘆的公里級,即每小時可鋪設1000米電纜。這一成就不僅展示了我國在高端裝備制造領域的自主創新能力,也為全球水下工程技術的發展注入了新的動力。

這款水下敷纜機器人的研發,是在我國海上新能源發電不斷發展壯大的背景下進行的。隨著海底電纜敷埋施工面臨全新挑戰,過去的作業方式和場景受到限制,國外水下敷纜作業機器人無法適應我國近海的稀軟土質,存在易沉陷、行進難等問題。因此,為滿足日益增長的海底作業需求,水下敷纜作業機器人的研究變得迫在眉睫。
該水下敷纜機器人具有履帶、雪橇行走能力和“搜尋—挖溝—敷埋”一體化作業能力,敷埋作業速度可達1000米/小時,機器人本體核心部件實現100%自主可控。這意味著項目從理論研究過渡至樣機實物階段,展現了我國在高端裝備制造領域的自主創新能力。
針對水下敷纜作業機器人普遍存在的海纜感知能力弱、持續作業時間短等難題,廣東電網公司攜手中國科學院自動化研究所、哈爾濱工程大學及山東未來機器人有限公司等科研機構與企業,組建了一支多學科交叉的精英攻關團隊。團隊通過創新性地融合“聲-光-磁-電”多模態信息,研發出了一種高效的海纜探測定位方法,成功攻克了多傳感器組合導航中的抗干擾技術難題。這一創新不僅解決了低能見度水下環境中海纜搜尋定位困難的問題,還有效避免了近底水下導航失效的困擾。
考慮到海底環境的復雜性,項目團隊精心設計了履帶和雪橇兩種行進模式,這兩種模式均能在稀軟土海床上實現穩定行進,從而有效解決了機器人在此類復雜環境下的行進難題。此次研發的機器人將全面適用于我國近海的稀軟土海底環境,其最大敷埋作業速度可達1000米/小時,相較于傳統作業方式,作業速度實現了近一倍的提升。
這一成果的取得,不僅為我國海洋工程技術的進步鋪平了道路,也為全球水下工程技術的發展提供了新的解決方案。未來,我們期待更多像這樣的科技產品能夠不斷涌現,為國家的建設與發展貢獻更多力量。
來源: 李傳福
